Стол с мотором по воде
Обновлено: 18.05.2024
«Motosurf» (Мотосёрф) — это единственное общепринятое определение для любых досок для сёрфинга с мотором. Motosurf World Cup на сегодняшний день единственные международные соревнования, в этой дисциплине. Часто мотосёрфы называют «Jet Board» или «Jet Power Board» или «Power Board», а также можно услышать «Electric Surf Board», но это относится только к сёрфам с электродвигателем. В России все доски с мотором принято называть Jet Surf (Джет Сёрф), хотя это неправильно. На самом деле JetSurf — это название торговой марки Чешской компанией MSR Engines. Так же, как ESurf является названием конкретной модели фирмы «Mertek». Но в интернете вы можете встречать самые разные названия этого спорта.
Нас постоянно спрашивают какой мотосёрф лучше выбрать для себя. Да, действительно, сегодня есть из чего выбирать. В нашем магазине представлено огромное разнообразие моделей сёрфов с мотором. Мы специально стараемся поддерживать большой ассортимент, что бы у Вас была возможность выбрать наиболее подходящий по параметрам мотосёрф. Мы не продвигаем конкретный бренд, а стараемся предоставить максимально объективную информацию, так как тестируем все доски сами, посещаем заводы и встречаемся с основателями компаний.
До недавнего времени единственным игроком на рынке была компания JetSurf из Чехии, но сейчас ситуация изменилась. Появляется всё больше и больше достойных конкурентов. Надо отдать должное компании JetSurf за то, что они до сих пор удерживают лидирующие позиции и в определенной степени подстёгивают рынок. Также стоит вспомнить американскую компанию «Jet Ski», уже канувшую в лету, которая стала пионером серийного выпуска сёрф досок с мотором. Вес первых мотосёрфов достигал 70 кг и сейчас они выглядят как динозавры. Компания «Jet Ski Power Board» прекратила своё существование 10 лет назад, в то время, компания JetSurf только вышла на рынок. Да и первые джет сёрфы отличаются от новых разработок примерно, как паровой автомобиль от новенькой Tesla. Индустрия развивается стремительно, даже первые электрические модели трёх-четырёхлетней давности уже выглядят архаизмом, на фоне новых моделей, превосходящих вдвое по скорости и так же вдвое меньших по весу.
Почему Мотосёрф, а не другие виды водно-моторного спорта
К началу сезона 2019, мы решили написать для Вас подробную инструкцию, как правильно выбрать мотосёрф, на что стоит обращать внимание и где покупать.
Итак, вы решили купить доску для сёрфинга с мотором? Это безусловно отличное вложение, которое доставит Вам и вашим друзьям массу удовольствия и веселья. Мало какой из водных видов спорта и развлечений может сравниться с мотосёрфом, по степени драйва и свободы передвижениям.
Помните, что заниматься мотосёрфингом в отличии от классического сёрфинга можно, где и когда угодно, при любой погоде. Подходит любой водоём, лишь бы это не было болото, заросшее тиной с большим количеством мусора, так как посторонние предметы могут попадать в водомёт, что может привести к его поломке. В остальном, нет никаких ограничений. Вы не зависите от ветра, катера или волн как в других видах спорта (кайт сёрфинге, Вэйк-сёрфинге и классическом сёрфинге), хотя заниматься мотосёрфингом можно и на море, и на океанических волнах.
Кроме того, стоит отметить необычайную мобильность всех мотосёрфов, вы сможете свободно перемещаться с ними куда угодно в отличии от аквабайка или катера.
Jet Surf vs Jet Ski
Стоимость нового аквабайка и мотосёрфа сопоставима, тем не менее, мотосёрф однозначно выигрывает это сравнение, превосходя аквабайк буквально во всем, кроме разве что максимальной скорости, возможности перемещаться на большие расстояния и брать пассажиров. Но если мы возьмём такие параметры, как: простота в эксплуатации, ощущения от катания, «Fun», спортивные нагрузки; в этом мотосёрф куда интереснее и перспективнее. Занимаясь мотосёрфингом, включается все тело, получаешь непередаваемые ощущения от свободного скольжения по водной глади, это не то, что сидеть на табуретке с мотором, хоть и водной. Исключение, пожалуй, составляет стоячий гидроцикл — это тоже активный и интересный спорт, хотя многие любители «стоячки» уже пересаживаются на Jet Surf, отмечая, что это гораздо увлекательнее и разнообразнее.
Стоимость всегда имеет значение, поэтому следует сразу сориентироваться в ценах.
Если Вы ограничены в бюджете, ищите наиболее доступный мотосёрф, то имейте ввиду, что дешевле 300 000 рублей выбор практически отсутствует и в ближайшем будущем не стоит ожидать снижения цен. Китайские производители как не старались, не сумели создать ни один достойный внимания мотосёрф за подобную цену. Нам удалось найти лишь одного китайского производителя, выпускающего достойный внимания продукт, и его стоимость в России составляет 450.000 руб.
Есть несколько причин, почему цены продолжают держаться на высоком уровне. Прежде всего, это штучное производство, технологии очень сложны (на создание одного корпуса уходит несколько дней), используются дорогостоящие материалы (карбон), оригинальные двигатели собирают вручную. Каждая доска проходит проверку на воде (в специальном бассейне). Таким образом, высокие цены оправданы крайне сложной технологией и качеством изделий.
Мотосёрф до 500 000 рублей.
Теоретически можно рассмотреть вариант б/у Jet Surf, но мы не рекомендуем подобные эксперименты по нескольким причинам. Jet Surf пока ещё не массовый продукт и тем более продажи в России не велики, что бы можно было говорить о каком-то вторичном рынке. Б/у Джет Сёрфы появляются крайне редко, цены на них высоки и стоит помнить, что двигатель это примерно половина стоимости всей доски, в случае его поломки, эти деньги будут выброшены на ветер, так как при покупке с рук вы не получаете никакой гарантии. В нашем магазине можно подобрать отличные доски с гарантией и доставкой.
Sea Horse — Inflatаble Jet Ski
Это оригинальный Российский проект, созданный при участии нашей компании, конструкторским бюро в Санкт-Петербурге. Производится он индивидуально на заказ. Срок изготовления — месяц. Двигатель используется от мотороллера Yamaha Jog, что означает отсутствие проблем с сервисным обслуживанием и поиском запчастей. Кроме того, предоставляется годовая гарантия. Данный мотосёрф не скоростной, но простой в использовании, практичный и очень компактный, за счёт надувного корпуса, который можно убрать в сумку.
Строго говоря это не мотосёрф, а Sup Board с электродвигателем. На нём вы не сможете прокатиться с ветерком, но тем не менее это интереснее чем классический Sup. Можно проехать большее расстояние, передвигаться быстрее, помогая себе веслом или просто наслаждаться сидя или стоя на доске, не прилагая никаких усилий. Доска очень надёжная и простая, подходит для всех возрастов. Пользуется спросом в прокатах и центрах водных развлечений для всей семьи.
Компания Onean выпускает похожий продукт, который называется Manta board. Это тоже Sup доска с небольшим, но чуть более мощным электродвигателем. Кроме того, на Manta вы сможете кататься вдвоём и даже троём. Это примерно, как надувной матрас, который плавает сам, подходит для семейного отдыха.
Это китайский, но оригинальный и достаточно качественный и надёжный продукт с годовой гарантией. Доска надувная т.е. легко складывается в багажник автомобиля. Подходит для детей и взрослых, особых ограничений по весу нет. Комплектуется гидрофойлом, он не позволит парить над водой как на eFoil, а служит для большей устойчивости во время катания. Вы можете рассчитывать на скорость до 30 км/час. Это совсем не спортивный вариант, а скорее хорошая игрушка.
Испанская компания Onean была первой на рынке, кто сделал попытку существенно снизить цены. Первые клиенты ожидали свои доски в течении нескольких лет. Уже с запуском массового производства, очередь была минимум полгода. Но на деле все оказалось не так просто. Onean Carver — это хорошая рабочая доска, по форме напоминающая классический сёрф, но если вы весом больше 70 кг, много выжать из неё не получится. Эта доска отлично подходит для детей, хрупких девушек и мужчин с небольшим весом, иначе скорость будет слишком низкой.
Профессиональный спорт
Как уже было сказано выше, единственными официальными соревнованиями в данном виде спорта является чемпионат Мира по Мотосёрфингу: Motosurf World Cup
Правила чемпионата допускают участие райдеров с любыми моделями мотосёрфов, весом не более 20 кг. Не один из электрических сёрфов на сегодняшний день под эти параметры не подходит, они все тяжелее. По скорости и манёвренности мотосёрфы с ДВС (двигатель внутреннего сгорания) превосходят электро-доски.
Подавляющее большинство профессионалов выбирают модель «Titanium» от JetSurf, некоторые катаются на «Race», чуть менее популярна модель «Factory GP». Если вы хотите попробовать себя в гонках, то лучшим выбором станет «Titanium» или «Race». Отличие модели «Titanium» в строении глушителя, в нем хуже защита от попадания воды, но больше мощность. Следует так же учесть, что JetSurf не даёт гарантию на модель «Titanium». Такова политика производителя. Эту модель придётся подождать, она производится штучно и редко бывает в наличии у дилеров. Зато можно заказать свой оригинальный дизайн.
JetSurf: GP или Race
Не многие знают, что у этих двух популярных моделей один и тот же двигатель. Модели отличаются некоторыми комплектующими, формой корпуса и креплениями для ног. У модели Race, традиционно только два крепления, что предполагает, катание в одной стойке (правой или левой). На модели Factory GP стоят 4 крепления, что позволяет кататься с правой и левой стойкой. Кстати, эти крепления можно легко заменить и поставить 4 крепления на модель Race. Чуть сложнее, но тоже можно поставить более удобные крепления от Race на модель Factory GP.
Теперь о форме корпуса. Ощущения в повороте у этих двух досок различные. По началу вы вряд ли будете чувствовать эти нюансы, но привыкнув кататься на одной доске, можно заметить значительную разницу в ощущениях пересев на другую модель. Корпус у GP более плоский, угловатый (немного похож по форме на Вейк борд или кайт борд) и более стабильный, за счёт этого несколько проще ехать по прямой. Корпус Race с округлыми краями, что позволяет увереннее закладывать на крутых поворотах и уменьшить радиус. Race более профессиональная модель и хоть двигатель один и тот же, рвёт с места она более резво за счёт детальных настроек системы.
Модель Ultra Sport, в 2019 году была переименована в просто Sport. Не смотря на своё название, эта модель скорее подойдёт любителям, чем для участия в соревнованиях. Эта модель самая надёжная в линейке JetSurf за счёт максимально щадящего режима работы двигателя. О центрах проката и водных развлечениях речь пойдёт далее.
Центры проката оборудования
Сегодня центры проката мотосёрфов открываются по всему миру, новизна подогревает интерес, люди с радостью решаются испытать новые ощущения. Поэтому сдавать технику в аренду на пляже или берегу озера — это отличная бизнес идея.
Модели Sport или Ultra Sport от JetSurf, пользуются популярностью в прокатном бизнесе. Но надо понимать, что на джет сёрфе, кататься смогут далеко не все и не сразу. Поэтому стоит создавать не просто прокат, а скорее тренинговый центр. Желательно иметь помещение у воды, где можно сразу давать уроки каждому, кто решил взять в аренду мотосёрф. Обычно на обучение уходит от 30 мин до нескольких часов, после чего человек уже может кататься самостоятельно. Тем не менее, техника требует внимания, например, доску нельзя топить. Намного проще дело обстоит с электро-сёрфами их можно топить и переворачивать. Они практически не требуют тренировки, кроме элементарных правил безопасности.
Команда Motosurfing рекомендует для центров проката модель Mogrel, от производителя Torque. Свяжитесь с нами, и мы предоставим вам подробный план по открытию прокатного бизнеса на основе jet-бордов Torque. Для проката отлично подходят все модели Onean, учитывая, что батареи легко меняются и заряжаются автономно. Также весьма популярны SUP борды, о которых уже шла речь выше (SupJet и eSurf).
Существует ли лучшая доска?
Это, пожалуй, самый сложный вопрос на который, разумеется, нет однозначного ответа, так как каждый производитель считает, что именно его продукция круче всех остальных. Например, доска Awake обладает действительно впечатляющими характеристиками, при том, что цена на эту доску хоть и высока, но даже ниже некоторых моделей Lampuga. Проблема в том, что у нас пока нет достаточных данных от покупателей, кто уже может дать нам обратную связь об использовании этого сёрфа в реальных условиях.
Какая доска самая быстрая?
На этот вопрос ответить проще. На сегодняшний день топовые модели с электрическим двигателем превосходят по скорости бензиновые модели. Рекорд скорости около 60 км/час принадлежал до не давнего времени модели GTR от Lampuga, а сейчас эти же характеристики заявляет Radinn и Awake, тогда как для бензиновых двигателей рекорд 55 км/час.
БЕНЗИН VS ЭЛЕКТРО
Это центральная тема статьи и с этим выбором нужно определяться в первую очередь тем, кто решил приобрести джет-борд в личное пользование. Рассмотрим плюсы, минусы и особенности бензиновых и электрических досок.
Как уже было сказано выше, если ваша цель профессиональный спорт, то мы рекомендуем выбирать только бензиновые доски. Да и в любом случае если вы ближе к спорту, экстриму и драйву, вам больше подойдёт ДВС двигатель. Но это мотоспорт. Будьте готовы к тому, что ваши руки будут пахнуть маслом. Все бензиновые двигатели шумные. Если вы хотите кататься по небольшому озерцу, окружённому частными домами, учтите, что вам не будут рады. Далеко не на всех водоёмах разрешено использовать ДВС двигатель.
Итак, бензиновый сёрф более резкий, манёвренный, у него больше потенциал для развития мастерства, различных трюков, прыжков. На доске с ДВС вы не поедите сразу, даже если у вас богатый опыт в других видах спорта. Как минимум один день уйдёт на обучение. Научиться стартовать и вставать на доску. В этом нет ничего сложного и обычно хватает нескольких часов, чтобы научиться стоять на доске, пусть и не очень уверенно. Имейте в виду, что ДВС сёрфы нельзя топить, поэтому вам следует быть внимательным и с осторожностью давать кататься неопытным друзьям. А если и дадите, то это может быть опасно как для вашей доски, так и для друзей.
На все сёрфы с бензиновым двигателем мы встаём только на ходу т.е. в начале заводим, стартуем и уже потом встаём на доску. Не хочется в этой статье уходить в детали обучения, для этого есть отдельный мануал. Вам придётся научиться некоторым правилам того, как обращаться с техникой, надо использовать WD-40, масло для двухтактных двигателей и, разумеется, бензин (бензин заранее смешивается с маслом и потом заправляется). Во всем этом нет ничего сложного, но если вы привыкли после катания просто воткнуть ваш Seabob в розетку и забыть о нем до следующего дня, то это не вариант с Petrol boards.
Да электрический сёрфы в этом смысле гораздо проще. Просто втыкаем в розетку и заряжаем. Тем более сейчас на всех электро сёрфах устанавливаются съёмные батареи, т.е. можно кататься и параллельно заряжать второй комплект батарей, а потом просто поменять батареи и продолжить катание.
Электрические сёрфы можно не опасаясь притопить, благодаря гидроизоляции это безопасно. На электро сёрфах можно сидеть и лежать, как правило кататься могут взрослые и дети. Если говорить о минусах, то это вес. Электрические доски весят больше, из-за тяжёлых батарей. Сам мотосёрф, без батарей, может весить до 15 кг, плюс блок батарей ещё 15 кг. Бензиновые доски гораздо легче, их вес не превышает 20 кг. Отнести электросёрф от машины до водоёма можно поочерёдно, сначала доску, потом батареи. Кроме того, многие производители сейчас предлагают удобные тележки на колёсиках.
Время катания.
Время катания у бензиновых сёрфов больше, и составляет 2 часа, а у модели Jet Surf adventure до 3 часов без остановки. У самых продвинутых электросёрфов, время непрерывного катания на одном заряде не превысит 40 минут. Но что бы решить эту проблему вам достаточно приобрести быструю зарядку и дополнительную батарею.
Кстати, имейте в виду, что у сёрфов с ДВС тоже есть аккумулятор, который нуждается в зарядке (он нужен для стартера).
Электрофойлы
Электро-Фойл или eFoil — это новое направление в мотосёрфинге, начавшееся не более 2 лет назад. А в массовой продаже электро-сёрфы с подводным крылом, появились не более года назад. Видео с парящими над водой сёрфами, словно движимыми неведомой силой, буквально взорвали интернет. Подробнее об Электро-Фойлах читайте в нашей статье.
Я, как автор этой статьи крайне рекомендую вам испытать эти не с чем не сравнимые ощущения свободного полёта над водой, буквально нарушая законы гравитации. Вы почувствуете невероятную лёгкость, свободу полёта. Доска откликается буквально на малейшие изменения положения тела. Ощущение движения во всех плоскостях пространства. Максимальная скорость достигает 40 км/час.
Что касается выбора, то на момент написания статьи, весной 2019 года, у нас есть лучшие доски в этом сегменте: Flite board и Lift Foils. Только эти две компании делают действительно достойные и проверенные мотосёрфы с гидрофойлом. Все остальные проекты и заявленные модели, остаются не более чем проектами. Никто не видел их живьём и есть большие сомнения, что они вообще попадут на рынок в таком виде и за такую цену. Обе эти компании проделали долгий путь прежде, чем создать свои электрофойлы. Обе модели очень качественные, красивые и надёжные, составляют достойную конкуренцию друг другу. Отличие лишь в том, что Lift Foils — это уже многократно проверенные в бою доски, получившие множество положительных отзывов. А Flite только выходят на массовый рынок, но они имеют целый ряд интересных технических фишек и особенностей.
Когда покупать?
Это на самом деле вопрос более серьёзный чем может показаться на первый взгляд. Большинство производителей все ещё крошечные предприятия, которые не справляются с объёмом заказов по всему миру. Очередь на самые востребованные модели может достигать года. Подобная ситуация не редкость в яхтенной индустрии. Дорогие востребованные яхты приходится ждать, иногда годами, их практически невозможно получить «завтра», только если перекупить место в очереди, что можно сделать далеко не всегда. И как гласит русская поговорка «готовь сани летом», поэтому покупать мотосерф в разгар сезона или в начале сезона это плохой вариант, потому что получить его быстро скорее всего не получиться. Заказывая свой jet board зимой, вы гарантировано получите его к началу сезона, в это время производители наименее загружены. Стоит так же понимать, что помимо очереди на производстве логистика тоже занимает время. Все доски поставляются под заказ, в Москве, как правило, редко можно найти мотосёрф в наличии.
Электро доска на подводных крыльях
Компактные устройства на подводных крыльях становятся все более распространенными, так как электрические двигательные установки в последние годы развиваются очень быстро. Новая электрическая доска для серфинга Neptun X, оснащенная несущим крылом, поднимает своего владельца над уровнем воды. Это доска, на которой вы можете стоять и изменяя обороты перемещаться вверх и вниз из воды, чтобы фактически бесшумно «лететь» над ее поверхностью со скоростью 45 км/ч в течение 80 минут, которые определяет заряд съемной батареи.
После нажатия кнопки на пульте ДУ доска для серфинга Neptun X, рассчитанная на райдера весом до 130 кг, начнет ускоряться, поднимаясь выше и выше из воды по мере того, как будет достигнута максимальная скорость.
Электрическая доска для серфинга сегодня является составной частью быстроразвивающегося рынка электрифицированных видов водного спорта. Новинка Neptun X от китайской компании eFoilFly - довольно простое устройство, которое следует по стопам уже существующих на рынке аналогов. Она изготовлена из углеродного волокна, с секциями из стекловолокна, пенополистирола и смолы, что, по мнению разработчиков, позволяет внешнему корпусу оставаться достаточно прохладным и, не нагреваться чрезмерно на солнце. Neptun X имеет длину 168 см, ширину 110 см и высоту 12 см, а ее подводные крылья размах - 80 см.
Электрическая доска для серфинга Neptun X имеет вес 35,3 кг. Однако, она разбирается и, самый тяжелый ее элемент - корпус весит 16,5 кг, поэтому ее будет достаточно удобно нести ее к машине.
В движение новинку приводит 48В электрический двигатель мощностью 3 кВт. Управление им осуществляется с помощью пульта ДУ, выполненного в форме пистолета. Для приведения устройства в движение необходимо нажать на «спусковой крючок» и, электрическая доска для серфинга, рассчитанная на райдера весом до 130 кг, начнет ускоряться, поднимаясь выше и выше из воды по мере того, как будет достигнута максимальная скорость. Как только доска поднимется из воды, вы получите ощущение легкого, расслабленного полета над водой. Маневрировать на новинке можно изменяя положение центра тяжести тела.
Электрическая доска для серфинга Neptun X имеет длину 168 см, ширину 110 см и высоту 12 см, а ее подводные крылья размах - 80 см.
Съемная батарея выполнена на ячейках Samsung, имеет емкость 2,3 кВтч и вес 12,5 кг. Разработка eFoilFly требует для зарядки около 2 часов, что обеспечивает до 80 минут времени работы устройства на воде. После использования, для удобства перевозки можно снять крыло весом 6,3 кг с электрической доски для серфинга и, разместить все в багажнике автомобиля. Несмотря на то, что вся доска Neptun X будучи подготовленной к плаванию имеет вес 35,3 кг, она разбирается и, самый тяжелый ее элемент - корпус весит всего 16,5 кг, поэтому большинству людей будет достаточно удобно нести ее к машине.
Электрическая доска для серфинга Neptun X позволяет бесшумно «лететь» над поверхностью воды со скоростью 45 км/ч в течение 80 минут, которые определяет заряд батареи.
Разбираемся как "поженить" лодку с мотором.
Итак, приступим! Каждый человек, купивший новенький мотор без пробега, сталкивается с необходимостью его обкатки. Он может это сделать прямо в сервисном центре магазина, причем в моем случае мне настоятельно рекомендовали произвести первый запуск именно их мастерами, иначе мотор не вставал на гарантию. Мотор мой, кому интересно, Mercury 3.3. Мастер произвел первый пуск, дал мотору поработать и отпустил нас с богом и с документами. Гарантией я решил не пользоваться, обкатывал и все масла менял сам, но тут каждый для себя сам решает, как ему лучше.
Но речь сегодня пойдет не про техобслуживание, а про поведение лодки на воде после, того, как вы установили мотор. Казалось бы, все максимально просто, вы ставите мотор на лодку, привинчиваете его, дергаете "дыргалку", и летите над волной. С такими мечтами ставил я свой новенький моторчик на лодку.
Реальность же оказалась малость неподатлива, хотя поначалу все шло неплохо. Повесив примерно на глазок мотор, я запустил его и дал газа. Представьте, какое удовольствие после долгих трудовых прогулок на веслах, во время которых ты успеешь не только обдумать всю свою прошлую жизнь, но и построить парочку планов на будущее, втопить наконец на своем моторе, выйти на нем на глиссирование! ( Ахтунг! Перед выходом на глиссирование автор произвел обкатку мотора . ) Лодка начинает резко ускоряться, ветер бьет в лицо солеными брызгами , и вот, достигая по всем ощущениям своей максималки, уже на глиссере, мотор неожиданно взревывает, и лодка как будто упирается в некую невидимую подушку, сразу теряя до трети скорости. "Исторический момент" был испорчен напрочь. Разгоняюсь снова, и опять то же самое! Максимальная скорость - пара секунд удовольствия - и резкая потеря скорости, мотор при этом орет и молотит воздух вперемежку с водой за бортом.
Не стану томить тех, кто не знает, это явление называют "прохват", он случается на плоскодонных надувных лодках, когда на скорости под плоским (!) их дном образуется воздушный пузырь, который лодка загребает с поверхности воды, и далее этот пузырь выдавливается прямо на крутящийся винт, который теряет контакт с водой, и начинает молотить воздух. Все, скорость потеряна. У воды достаточно серьезный коэффициент трения, и лодка моментально "вязнет" в ней.
Методов борьбы с этим явлением несколько, и их придется применять и комбинировать под каждую конкретную "спарку" лодки и мотора индивидуально.
- Первый способ. Угол наклона мотора. Для начала можно попробовать обойтись "малой кровью". На всех лодочных моторах, которые позиционируют себя именно как моторы, а не вентиляторы для резиновых надувных изделий, есть специальный механизм, который позволяет регулировать наклон мотора относительно транца. Там есть несколько отверстий, и фиксирующий штырь, можно поиграться ими. При большом угле мотора лодка начинает "кобрить", поднимать нос, и предназначен такой угол для того, чтобы двигать перегруженную лодку, при слишком малом - нос лодки начинает давить вниз. Нужно попробовать разные варианты, и оставить худший (шутка).
После этих манипуляций у многих лодка начинает вести себя лучше. Но не в моем случае. Поэтому я продолжил эксперименты.
- Второй способ. Антикавитационная плита . Это металлическая пластина, как правило, самодельная, если говорить о маленьких моторах, которую прикручивают в нижней части "ноги" мотора, на уровне воды. Крайне эффективная вещь, но имеет два критических для меня недостатка. Во-первых, чтобы ее установить, придется сверлить отверстия в моторе под крепежные болты, и совсем не каждый на такое решится. Во-вторых, с такой плитой мотор становится более габаритным, и уже не влезет в чехол. Да и сделать своими руками такую штуку смогут не все.
Кто отважился на такую "операцию", думаю, дальше могут не читать, они проблему решили.
В этом месте многие захотят перелистать вниз и написать гневный комментарий, мол автор призывает сверлить моторы! Не сдерживайте порыв. Ну а я пошел дальше.
- Третий способ. Радикальный. Пилим транец . Как я упоминал выше, коэффициент трения воды радует всех своими уверенными показателями, поэтому от заглубления лодочного мотора сильно зависит и скорость лодки. Также от этого заглубления зависит и проходимость на мелях, но сегодня не будем об этом. В своей жажде экспериментов, после просмотра десятков видосов по этой тематике, я и завышал транец на несколько сантиметров, и пилил его до 5 сантиметров вниз. Результат был очень разный, но меня абсолютно не устроил. Если поднимать мотор выше, прохваты начинались с удвоенной силой, особенно при повороте лодки, если заглублять - лодка становилась медленной, но прохваты исчезали. Даже удивительно, насколько сильный эти несколько "лишних" сантиметров мотора под водой создавали останавливающий эффект.
В результате остался с попиленным транцем, и вернул все как было, как мог. Но кому-то этот способ может и покажется интересным.
Четвертый способ. Рабочий. Как ни странно, нашей плоскодонке не хватает килеватости. Именно киль спасет отцов русской демократии от неминуемого позора в борьбе с мыль воздушными пузырями. Возьмите палку, обмотайте ее чем-нибудь мягким, хоть старым полиэтиленом от парника, положите по центральной оси лодки, прижмите полом и накачайте. На днище лодки появится ярковыраженный киль. После того, как я от отчаянья испытал этот метод, результат меня очень порадовал. Киль режет воздушный пузырь под лодкой пополам, не давая тому попадать на винт мотора, прохваты уходят. Также ход лодки становится более стабильный, без вихляний, присущих плоскодонкам. Но есть два небольших недостатка:
Несколько падает максимальная скорость, но не сильно, это неминуемое зло из-за повышения коэффициента трения днища лодки из-за выпирающего киля.
Появляется еще один надувной элемент, который еще и надо защитить от подводных сюрпризов. Правда плюс в том, что появляется еще один, небольшой элемент плавучести лодки, безопасности.
Поворотный стол. Часть 2
Привет, Хабр! В предыдущей статье я рассказывал о наших продуктах – поворотных столах для круговой фотосъёмки. За прошедшее время нам удалось серьёзно продвинуться вперёд и разработать новые устройства на базе Ардуино с использованием коллекторных и бесколлекторных двигателей.
Поворотный стол не такое уж простое техническое изделие как может показаться на первый взгляд. Например, в автоматическом режиме стол поворачивается на нужный угол, выдерживает паузу для того чтобы предмет съёмки смог успокоиться и стать неподвижным, автоматически делает снимок с фотоаппарата, затем некоторое время ожидает окончания экспозиции и переходит к следующему шагу. Так стол совершает полный оборот, и получается серия снимков предмета со всех сторон. Есть и другие режимы работы.
Мы выпускаем столы разных размеров. Самые ходовые – с диаметром столешницы 400, 600 и 900 миллиметров. Столы способны вращать довольно приличный груз, например, стол 600 выдерживает 150 кг, а стол 900 – 250 кг. Как-то приходилось делать по спецзаказу стол диаметром 2700 миллиметров, выдерживающий груз до 700 кг.
Как говорилось в части 1, стол с промышленным контроллером выходил слишком дорогим, поэтому мы решили переходить на Ардуино. Кроме того, мы хотели заменить шаговый двигатель коллекторным.
Почему мы решили менять двигатель? Шаговый двигатель – отличный вариант для программирования. Не надо заботиться о том, как переместить стол на заданное расстояние, всё уже сделано за нас. Шаговый двигатель оснащён логическим контроллером, просто используй нужные команды и ни о чём не думай.
Но есть один существенный недостаток. Шаговый двигатель сильно шумит. Иногда двигатель попадает в резонанс, и тогда тарахтение стола становится невыносимым.
Новая схема работы стола была простой: есть двигатель с питанием на 24 вольта и встроенным редуктором. Двигатель вращает столешницу и управляется через преобразователь ШИМа, так называемый драйвер двигателя. К вращающейся столешнице подсоединён оптический энкодер, передающий текущее положение в скетч Ардуино, который должен управлять двигателем посредством ШИМ-сигнала. И первой моей задачей было научить скетч перемещать стол из точки A в точку B.
Признаться, начинал я эту работу с некоторой робостью. Придётся ли погружаться в изучение ТАУ-регуляторов? Если да, то, скорее всего, надо будет оперировать значением мгновенной скорости. Позволит ли медленная и ограниченная ардуина проводить необходимые вычисления в реальном времени? К счастью, всё оказалось намного проще.
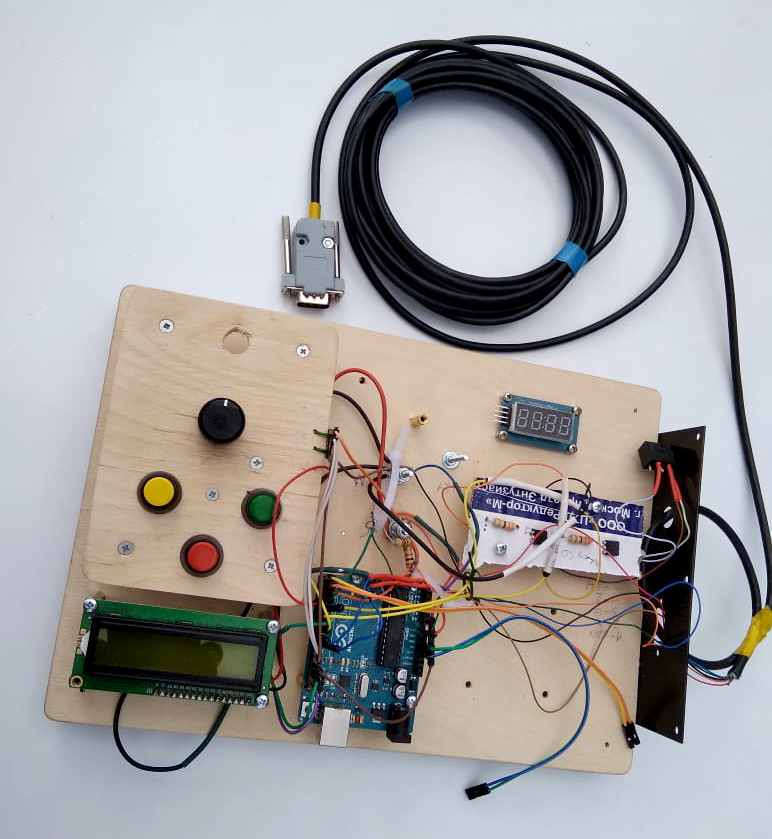
Наш первый макет. Arduino Uno, двустрочный дисплей, кнопки
Итак, скетч должен получать данные от энкодера и управлять двигателем посредством ШИМ-сигнала. Библиотека для энкодера сразу нашлась. Называется, как ни странно, Encoder, легко находится в менеджере библиотек Arduino IDE. Выводы энкодера подсоединяем к пинам 2 и 3, чтобы использовать прерывания – так значения текущего положения стола будут максимально близки к реальности.
Через какое-то время выяснится, что энкодер тем не менее слегка привирает. В чём дело? Плохой энкодер? Библиотека? Несколько отладочных скетчей, измерение импульсов, всё не то… Проблема в том, что мест, где может возникать ошибка энкодера, множество. Да и ошибка плавающая, то она есть, то нет. И вдруг совершенно случайно обнаруживается, что текущая конструкция стола несколько мм… шаткая что-ли. Раньше это было незаметно, ведь обратная связь в системе отсутствовала. А в новом изделии небольшой люфт приводил к большой погрешности в показаниях энкодера, так что потребовалось сделать конструкцию более жёсткой.
Ну что ж, теперь можно приступать к решению главной задачи по перемещению стола на заданное расстояние. Двигатель управляется ШИМ-сигналом. Это значение от единицы до 255, если не использовать большее разрешение. Сразу выяснилось, что двигатель с редуктором начинает вращать стол с некоторого минимального значения ШИМ. На первом макетном столе это значение равнялось 60.
Итак, попробуем реализовать самый простой алгоритм: первую половину пути линейно увеличиваем ШИМ, вторую половину – линейно уменьшаем:

Если значение ШИМ превышает 255, оно будет обрезано:
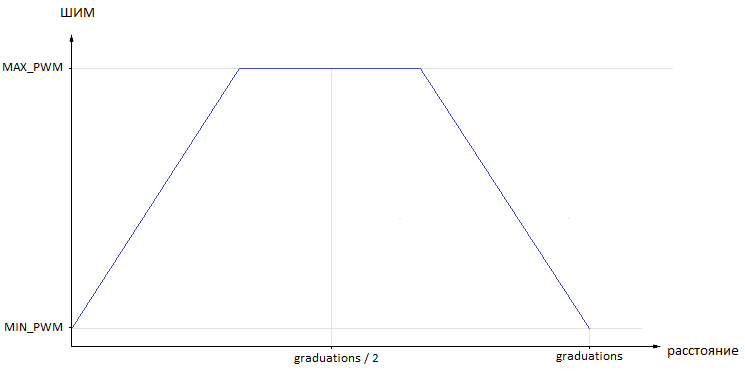
Угол наклонных прямых на графике можно сделать настраиваемым, тогда пользователь сможет регулировать движения и шаги стола: сделать их более резкими и быстрыми, либо плавными и медленными. И оказалось, что этот простейший подход даёт неплохие результаты!
Правда, иногда стол всё-таки слегка перескакивал через заданную точку. На этот случай мы предусмотрели коррекционное перемещение для возврата назад на минимальном ШИМе. Тем не менее, хотелось бы добиться того, чтобы стол совершал минимальное количество таких ошибок.
Если на минимальном ШИМе стол безошибочно переходит в нужную точку, то что надо сделать? Может быть, стоит использовать квадратичное замедление вместо линейного? Тогда стол будет подходить к концу движениях на скоростях, близких к минимальному значению. Можно и так. Но оказалось, что есть более простое решение. Достаточно начинать тормозить чуть раньше, как на картинке:

Большое значение имеет правильный выбор минимального значения ШИМ. Если значение слишком велико, стол будет часто ошибаться и перескакивать через заданную точку. Слишком маленькое значение приведёт к тому, что нагруженный стол не сможет тронуться.
Тут родилась идея о том, что столу с тяжёлым грузом надо помогать начать движение. То есть если стол в течение определённого промежутка времени не сдвигается с места, надо слегка увеличивать минимальный ШИМ. Но нужно также предусмотреть и верхний лимит увеличения, чтобы в случае короткого перемещения стол не перескочил через заданную точку.
В процессе тестирования выяснилась странная вещь: вроде бы стол вовремя останавливается, но затем оказывается, что текущая позиция немного смещена. Особенно это заметно, если на столе стоит тяжёлый и неустойчивый предмет, например, канистра с плещущейся водой. Стало понятно, что это происходит в результате вибрации в конце движения. Чтобы дождаться полного окончания движения стола и принять решение о необходимости коррекции, нужно подождать какое-то время. Я решил задачу так: делю время на короткие интервалы по 10 мс и дожидаюсь, пока в течении десяти последних интервалов стол не меняет своего положения. Это позволяет минимизировать время ожидания. Попробовал трясти стол с грузом в конце движения – и класс! Стол ждёт, пока тряска не закончится!
Итак, задача перемещения стола была решена. И решена, как выяснилось, неплохо: калибровочные скетчи и скетчи, измеряющие время и осуществляющие десятки и даже сотни циклов по перемещению стола на 360°, приводили стол в исходное положение с точностью до долей миллиметра.
Теперь можно было приступать к реализации режимов стола: автоматическому, ручному, безостановочному, режиму видео и вращению на 90°. Тут дело техники. Упомяну только о том, что в шаговых режимах, автоматическом и ручном, была реализована ещё одна стадия отслеживания ошибок перемещения. Если на предыдущем шаге обнаружилась ошибка, её надо учесть и скорректировать количество меток энкодера, на которое надо переместить стол на следующем шаге. Это важно, поскольку стол в процессе работы может быть случайно сдвинут фотографом.
Как мы и предполагали, новый двигатель работал гораздо тише шагового. Тем не менее, во время работы был слышен лёгкий звон. Дело в том, что стандартная частота ШИМ в Ардуино менее 1 кГц, именно она и ощущается при работе мотора. После того, как мы увеличили частоту ШИМ до 15 кГц при помощи библиотеки PWM, звон исчез. Звук работающего двигателя стал приятным и чем-то напоминал звук движений Робокопа из голливудского фильма. После изменения частоты пришлось немного подкорректировать минимальное значение ШИМ в скетче.
Коллекторный двигатель с редуктором, который мы использовали в первом экспериментальном столе Драйвер двигателя – устройство, преобразующее ШИМ в управляющие сигналы
Теперь об управлении. Мы предполагали, что стол будет управляться при помощи проводного пульта. Предыдущий опыт общения с пользователями говорил о том, что длина кабеля должна быть достаточно большой, не менее 5 метров. Когда-то мы пытались использовать беспроводные пульты, но этот опыт был не слишком удачным.
Кроме того, надо было предусмотреть дисплей. Режимов и настроек не так уж и мало, надо информировать пользователя о текущем состоянии. Нашли на Алиэкспресс подходящие коробочки. Вот таким получился пульт, с управляющим энкодером, кнопками и дисплеем:

По ходу дела попался нам на глаза китайский бесщёточный двигатель. Вот такой:

Ему не нужен драйвер, контроллер у него внутри, и ШИМ можно подавать непосредственно на выходы. Кроме того, не нужно менять частоту ШИМ, он работает одинаково тихо на любой частоте. Позже стало ясно, что это тоже важно.
В один прекрасный момент посмотрели мы на наш пульт и подумали, что как-то он не слишком удобен. Надо крутить энкодер, чтобы попасть в нужный пункт меню, жать кнопку, проваливаться в подменю… Да тут ещё и проблема с дисплеем нарисовалась. Подсоединён он у нас был к двум пинам ардуинки и управлялся по протоколу I2C. Оказалось, что если быстро крутить управляющий энкодер и переключать пункты меню на экране, дисплей начинает глючить, пропускать или путать буквы, а через какое-то время и вовсе зависает.
А что, если вообще отказаться от пульта и использовать вместо него смартфон? Мобильное приложение может отображать движения стола в реальном времени и вообще сделает процесс управления очень удобным. Соединяться со столом можно через bluetooth, тут проблем нет. Кроме того, в мобильном приложении можно реализовать такие фишки пользовательского интерфейса, которые трудно сделать на пульте, например, поворот стола на произвольный угол. Так у нас начался второй этап разработки.
Со средой разработки вопросов не было, это должен быть Xamarin. Во-первых, у меня уже был опыт разработки на этой платформе. А во-вторых, нужно приложение и для Android, и для iOS. Многие фотографы – пижоны, и любят пользоваться айфонами.
Xamarin не предоставляет стандартных средств для работы с bluetooth, поэтому пришлось искать библиотеку. Я остановился на Bluetooth LE. Собственно, и выбора-то особого не было, да и где-то на форумах MSDN сотрудник Microsoft рекомендовал эту библиотеку для работы в Xamarin. На первый взгляд, плагин оставлял впечатление какой-то незавершённости, но потом оказалось, что он вполне рабочий.
О железе: вначале я использовал имеющийся у меня bluetooth модуль HC-6. Он не подходил для полноценной работы, поскольку нам был нужен bluetooth не ниже 4 версии, то есть bluetooth low energy – iOS в отличие от Android не работает со старыми версиями. Но я набросал нечто вроде тестового фреймворка для первых экспериментов. Потом мы перешли на модули JDY-34, вот такие:

Пришло время изучать Bluetooth GATT. И вот что я вам скажу: вроде и Интернет у нас есть, и информации море, а найти то, что тебе нужно, с каждым годом всё сложнее и сложнее. В общем виде оно вроде бы понятно: GATT как иерархическая структура, устройство, сервисы, характеристики, но вот детали…
Вспоминаю прекрасные руководства пользователя по операционным системам, программам и библиотекам 30-летней давности. Любая библиотека имела исчерпывающее описание всех методов и возможностей, это было очевидно и даже не обсуждалось. Написаны они были простым английским языком, и там можно было найти всю необходимую информацию. Кроме руководств своевременно выходили объёмные учебники, детально объясняющие все тонкости и проблемы.
Сейчас всё не так. Фреймворки меняют друг друга с калейдоскопической быстротой. Гайды пишутся, скорее, для галочки, а то их и вовсе нет. Массу времени приходится тратить на сбор информации в Интернете по крупицам… Да, судари мои, куда катится этот мир?
Исходя из архитектуры приложения, мне были нужны две возможности – write, чтобы посылать команды, и notify, чтобы получать ответы и уведомления. Но какую GATT-характеристику следует выбрать? В модуле JDY-34 есть несколько подходящих. Где-то в одном из описаний я нашёл UUID сервиса как в моём модуле и решил, что эту характеристику и надо использовать для записи и нотификации.
В этом и заключалась моя ошибка. Сначала вроде бы всё работало, но потом я стал замечать, что иногда ответы от стола приходят в искажённом виде. Вскоре я понял, что проблема заключается в следующем: приложение отправляет команду столу, но в это самое время от стола приходит очередной токен, и данные в общем буфере портятся. Как оказалось, никакой синхронизации на уровне характеристики нет, то есть запись и чтение могут перекрывать друг друга, и другого выхода, кроме использования раздельных характеристик для write и update нет. К счастью, модуль JDY-34 позволяет сделать это.
В итоге, мобильное приложение получилось таким:
И вот пришло время решать вопрос с комплектующими. Платы Nano были ненадёжны, среди модулей JDY-41 попадались бракованные. Предлагать недешёвое изделие с подобной начинкой – это неуважение к покупателю. Хотелось бы найти хорошие надёжные платы со встроенным bluetooth.
Первое, что мы попробовали, – это ESP32, но она нам не зашла. То ли плата была левая, то ли делали мы что-то неправильно, но нам никак не удавалось заставить работать энкодер.
Потом мы стали смотреть в сторону BLE Nano V3.0 Micro с интегрированным чипом Bluetooth TI CC2540 BLE. Тут вообще интересная история случилась: вроде как и характеристики были такие же, как в модуле JDY-34, вплоть до совпадения UUID, но характеристика для записи не работала. То есть нотификация и чтение работает, а запись – нет.
Хорошо, если найти подходящую плату со встроенным bluetooth модулем не получается, надо хотя бы заменить устаревшие китайские Nano на что-то приличное. Вот в Москве есть в продаже фирменная Nano Every, позиционируется как эволюция традиционной Nano. Но – парадокс! библиотека PWM на ней не работает, и, похоже, возможности устанавливать частоту ШИМ для отдельных пинов нет вовсе. Можно, правда, ускорить системное время, тогда и частота увеличится. Не слишком элегантно, но этот подход работает. Надо только увеличить все временные интервалы, использующиеся в скетче, ведь функции millis и micros будут выдавать ускоренное время.
Тем не менее, такой подход довольно стрёмный. Вот, например, функции чтения в классе Serial используют временную задержку. Выходит, надо её переустанавливать при помощи Serial.setTimeout. А сколько ещё подобных подводных камней?
Под конец нам всё-таки удалось найти плату с интегрированным bluetooth модулем. Это Nano 33 IoT. Эта плата позволяет программно сконструировать в скетче bluetooth-устройство со всеми его сервисами и характеристиками, используя библиотеку ArduinoBLE. Библиотека эта реализует полноценный GATT. Это здорово! Программисты меня поймут – я был впечатлён!
И напоследок о моторах. Бесколлекторный двигатель, конечно, предпочтительней. Он не требует драйвера, но самое главное – не нужно менять частоту ШИМ, двигатель не звенит на стандартной частоте. На самом деле, важнейшей характеристикой является передаточное число, чем оно больше – тем лучше. На достаточно большом передаточном числе стол работает очень устойчиво. Кроме того, можно добиться медленного перемещения стола на минимальном ШИМе, а это важно для безостановочного режима.
Наш финальный выбор – бесщёточный двигатель с передаточным числом 131 и плата Nano 33 IoT.

Кабели для соединения разных фотоаппаратов со столом
На всякий случай оставлю ссылки на исходники, вдруг кому-то будет интересно:
Как я покупал стол с регулируемой высотой

В этом небольшом посте хотелось бы затронуть одну из важных проблем, с которой сталкивается любой житель Хабра – неудобство постоянного положения «сидя» и отсутствия возможности «постоять» при работе за компьютером
Да, каких-то пару лет назад Kotyamba в своём посте «Идеальный стол для ежедневной работы за компьютером» предложил решение данной проблемы, но меня расстроило отсутствие примерных цен, различных сравнений, процесса сборки стола и прочих «лакомств», без которых Хабр становится унылым и скучным
Поэтому я решил поделиться своим опытом и информацией, собранной во время покупки такого интересного стола
С чего всё началось?
В один прекрасный день, закончив работу над очередным проектом и вставая из-за своего рабочего места, я вдруг задумался: «Как круто было бы, если стол подстраивался под меня, а не я под стол»
Мысль мне показалась более, чем здравой, и весь вечер того дня был потрачен на поиск такого стола и оценку предложений от ведущих ИМ, предлагающих такое чудо
К чему привели эти поиски?
«Детище» Хабра — Декарт v3.2
- Стоимость 14 600 RUR (+ около 7 000 RUR доставка)
- Регулировка стола: газлифт
- Ход: 380 мм
- Регулировка высоты: 74 – 112 см
- Грузоподъемность: до 45 кг
ErgoStol Duo
- Стоимость 27 900 RUR (+ 2 000 RUR доставка)
- Регулировка стола: электрическая
- Ход: 520 мм
- Регулировка высоты: 66 – 118 см
- Грузоподъемность: 70 кг
На окончательный выбор стола повлиял механизм подъема: встречал много мнений, что газлифт – довольно-таки не удобная и не рассчитанная на большой груз конструкция. Так же небольшой отзыв на Лайфхакере «намекнул» на то, что с такой регулировкой стола можно немного попотеть:
Ключевое слово тут «электро-регулируемый» — это значит, что вам не нужно будет постоянно что-то передвигать и откручивать. Достаточно всего лишь нажать на кнопку и стол поднимется или опустится до желаемой высоты
Да, признаюсь, цена декарта радовала, но я ведь на столе еще и покататься хочу выбирал себе стол на долгое время, поэтому обращал внимание на полезные свойства стола с точки зрения целевого использования.
В то же время в Duo меня подкупило наличие дополнительных гаджетов в виде выдвижной розетки и пропуска кабелей. Мелочи, но, черт побери, приятно.
И так, выбор пал на ErgoStol Duo, который впоследствии был успешно заказан.
Пару слов о доставке
Учитывая, что я живу не так близко к столице (г. Ставрополь), порадовала относительно быстрая доставка стола: заказ был сделан 4 июня, а получен уже 10 июня.
Все было упаковано в жесткий картон. Помимо этого, в магазине меня заверили, что в случае порчи товара транспортной компанией, мне бесплатно будет выслан новый экземпляр.
Сборка стола – на удивление, легкая задача
Вооружившись инструментами и, скачав инструкцию по сборке, я приступил к работе.
Стол был собран приблизительно в течение 20 – 25 минут.
Сам процесс сборки решил прокомментировать, дабы некоторые моменты либо не сходились с инструкцией, либо были плохо в ней описаны.
И так, распаковываем посылку




Далее соединяем две ножки между собой, получая раму, на которую уже можно положить столешницу


Затем самое интересное: так как мотор встроен только в одну ножку, то соединяем его со второй с помощью траверса. Как мне объяснили в службе поддержки, траверс можно делать любой длины (до 180 см), что позволяет заказывать столы длинной 2 — 2,5 метра (для конференций, возможно, самое то)




Все, рама готова
Теперь кладем столешницу на пол и прикладываем к ней раму. Выравниваем дырки в раме с отверстиями в столешницы и притягиваем все это саморезами, идущими в комплекте
Потом подключаем питание, которое состоит из блока питания и пульта управления


Добавляем последние штрихи




И финальный вариант, к которому мы так долго шли
Отдельно скажу про пульт управления: он довольно хитрожопый «хитрый» (еще бы – целых две кнопки), и, чтобы стол ехал, надо зажать обе кнопки в одном направлении. Как мне объяснили по телефону, это не баг, как можно было бы подумать, а фича — защита от случайных нажатий и от детей
Общие впечатления
Пользуюсь уже более трёх недель – полёт нормальный
В основном, работаю за компьютером посредством чередования положений: например, около 1 часа работаю сидя, потом минут 20 – 25 стоя. Еще можно во время смены положения проговаривать: «Мы писали, мы писали – наши пальчики устали…». Хотя, наверное, так говорили только в моей школе. Или нет?
Напоследок немного интересных фактов
- Этот пост был написан исключительно стоя
- На столе очень нравится кататься детям
- Стол прибавляет +10 к таланту выносливости
- Работая за таким столом, всегда находишься в центре внимания любопытных окружающих (родственников, друзей, знакомых)
UPD от 02.12.2017 г.
Прошло уже несколько лет после публикации статьи, а мне до сих пор сыпятся вопросы в социальных сетях и по почте по поводу выбора подобного стола.
За это время довелось собрать ещё несколько столов знакомым от разных производителей, поэтому тем, у кого появляется желание написать мне, предлагаю этого не делать, а почитать дальше.
Мое внимание в данный момент привлекает модель стола Shapdesk, которая заметно выигрывает по стоимости и имеет возможность комплектации столов дубовыми столешницами. Остальные работают пока только с ЛДСП и, как мне кажется, это не комильфо.

Главное в этой истории: чередуйте работу сидя и стоя. А еще лучше занимайтесь спортом и употребляйте здоровую пищу.
Читайте также: