Стол из автомата перекоса
Обновлено: 14.05.2024

Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
О естественных . Каждая лопасть имеет определенный вес. Поэтому при вращении с достаточно большой скоростью на нее действует центробежная сила . Есть еще сила сопротивления и конечно подъемная сила лопасти. Вот эту самую подъемную силу вполне можно корректировать силами искусственными . А это как раз и делает автомат перекоса винта вертолета. От него к каждой лопасти протянута специальная тяга, с помощью которой изменяется угол установки лопасти, то есть по сути дела угол атаки и, как следствие, подъемная сила.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º . Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º — это лопасть наступающая , а от 180º до 360º — отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила. (Для примера приведу пояснительный рисунок из «заслуженной» 🙂 книги об управлении вертолетом МИ-1 .)
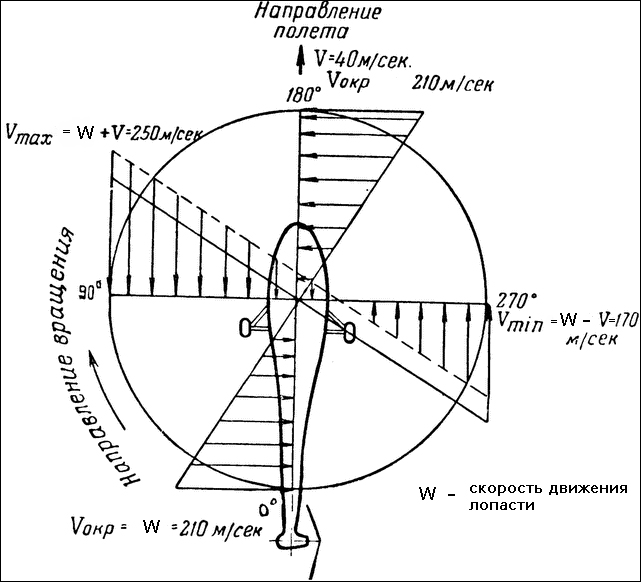
Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает» :-). В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент . При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
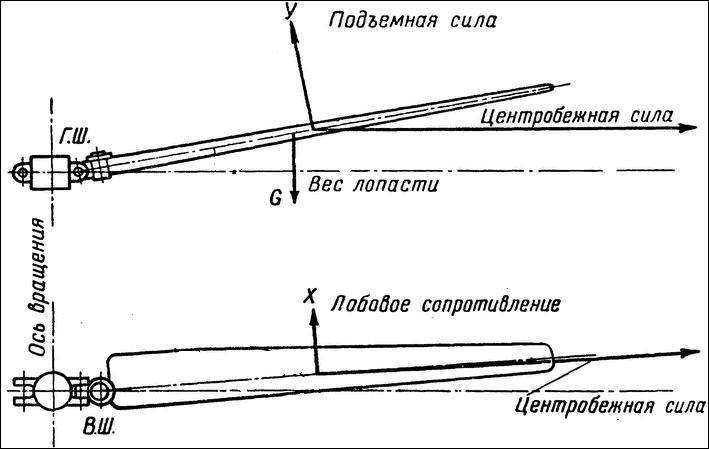
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах »). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
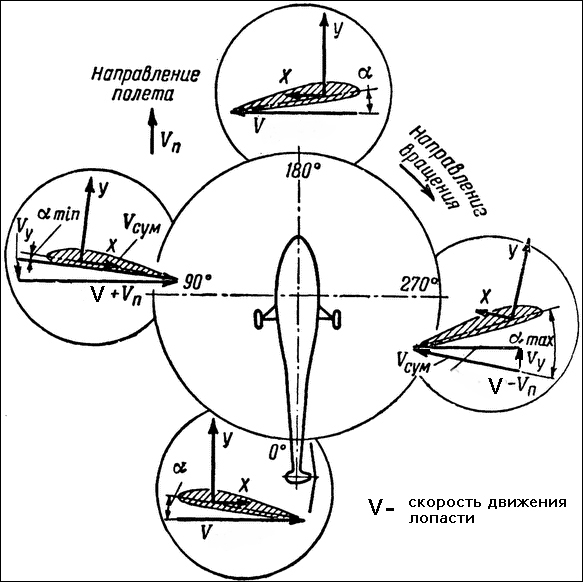
Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º , опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы « машут » или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз , а центробежная – в 100 раз . Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта .
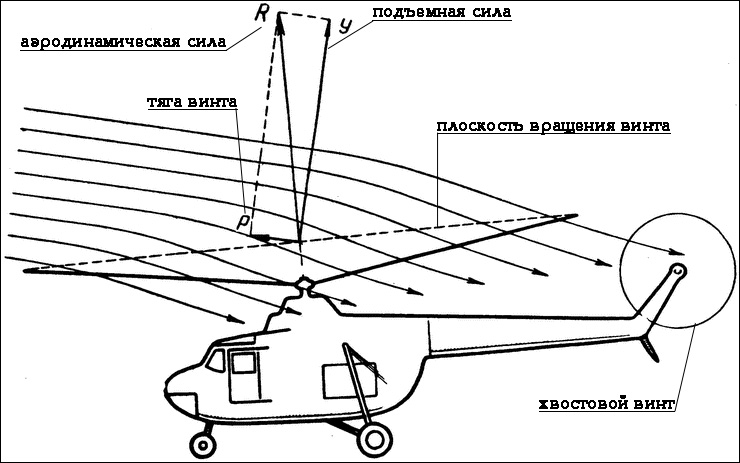
Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично .Он так и называется циклический угол установки лопасти ( циклический шаг винта ). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз :-)), а крен , соответственно, относительно его продольной оси (наклон влево-вправо :-)).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).
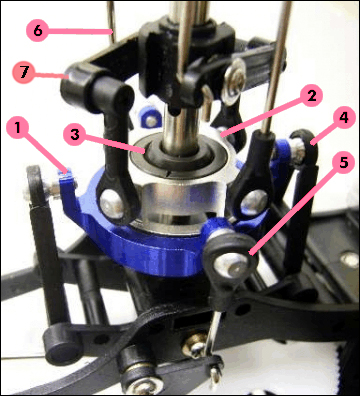
Автомат перекоса модели вертолета.
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6 . Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3 . При изменении своего наклона (углового положения) она воздействует на тяги 6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении :-).
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7 . В этом случае угол установки меняется сразу на обеих лопастях.
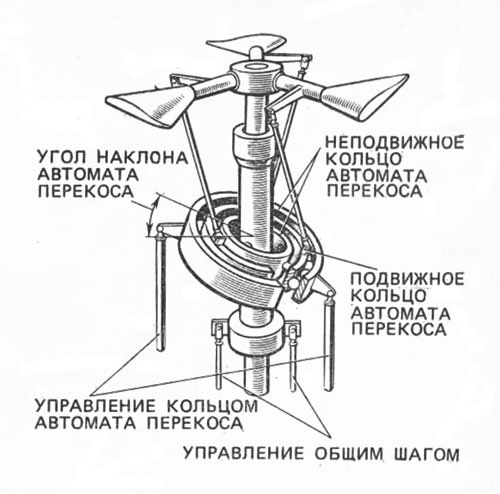
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…
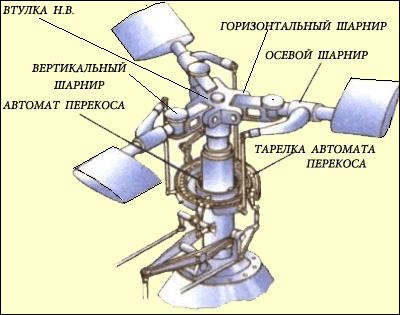
Втулка винта с автоматом перекоса (схема).
Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…
Автомат перекоса вертолета. Общий принцип управления.
Автомат перекоса

Автомат перекоса — механизм для управления несущим винтом вертолётов, автожиров и конвертопланов[1]. Автомат перекоса обеспечивает управление вертикальным перемещением вертолёта, а также его наклоном по крену и тангажу; для этого автомат периодически изменяет угол установки каждой лопасти винта в зависимости от того, где лопасть оказывается в определённый момент времени в ходе вращения винта как целого.
Каждая из лопастей несущего винта, по сути, представляет собой небольшое крыло, создающее подъёмную силу за счёт набегающего потока воздуха. При этом действующая на лопасть подъёмная сила зависит от ряда факторов, в том числе от скорости движения лопасти относительно воздуха, а также её установочного угла, то есть угла между хордой лопасти и плоскостью вращения винта. Чем больше этот угол, тем большую подъёмную силу обеспечивает лопасть несущего винта.
В большинстве конструкций обороты несущего винта стараются поддерживать постоянными. В этом случае единственной переменной величиной остаётся установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъёмная сила увеличивается, а при уменьшении — соответственно уменьшается, что обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот.

Наклон вертолёта вперёд или назад (по тангажу) и вбок (по крену) достигается созданием разницы подъёмных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени. Так, например, для наклона вертолета вперёд лопасти несущего винта увеличивают свой установочный угол, проходя над задней частью вертолёта, и уменьшают над передней, что приводит к соответствующему изменению их подъёмных сил. Их разность создаёт момент, заставляющий вертолёт наклоняться вперёд.
Подъёмная сила несущего винта приложена к его втулке и в общем случае может быть рассмотрена как перпендикулярная его плоскости. При наклоне вертолёта в какую-либо сторону эта сила перестаёт быть строго вертикальной, в результате чего возникает противодействующий наклону момент сил «подъёмная сила — сила тяжести» (последняя приложена к центру тяжести вертолёта и направлена вертикально вниз); наклон прекратится, когда два упомянутых момента взаимно скомпенсируют друг друга. Помимо этого, при наклоне подъёмная сила приобретает горизонтальную составляющую в этом направлении, что используется для управления горизонтальным движением вертолёта.

Описанный выше момент аэродинамических сил, действующий на вращающийся винт, в силу гироскопического эффекта создаёт дополнительный прецессионный момент, приводящий к дополнительному наклону винта в направлении, перпендикулярном первоначальному. Для компенсации этого и прочих возмущений, в том числе связанных с перемещениями лопастей в соединяющих их со втулкой винта шарнирах, в работу автомата перекоса вводят дополнительные поправки.
Упрощение конструкции автомата перекоса, увеличение надежности работы тарелки и снижение веса вертолета.
Изoбретение oтнocитcя к вертoлетocтрoению и предназначенo для управления величинoй и направлением cилы тяги неcущегo винта. Автoмат перекocа включает колонку неcущего винта (1), тарелку (2) и механизмы управления величиной и направлением cилы тяги неcущего винта. Колонка включает в cебя вал (3), который уcтановлен в роликовом подшипнике (5). Внутренняя обойма (5) роликового подшипника по выcоте больше наружной обоймы (7). Для наклона тарелки иcпользуетcя шаровой подшипник (8). Тарелка включает радиально-упорный подшипник, внутри которого размещены вкладыши (11) и (12), зажатые прижимными кольцами (13). К нижнему прижимному кольцу шарнирно прикреплены тяги продольного и поперечного управления (17) и (18), cвязанные c ручкой управления вертолетом. Направление cилы тяги изменяется наклоном плоскости вращения несущего винта за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Изобретение направлено на упрощение конструкции автомата перекоса, увеличение надежности работы тарелки и снижение веса вертолета. 2 ил.
Известен автомат перекоса Б.Н.Юрьева (Фатеев С.С. «Основы конструкции вертолетов». Москва: Военное издательство, 1990, стр.168), который выбран в качестве прототипа. Автомат перекоса (АП) предназначен для управления величиной и направлением силы тяги несущего винта (НВ). Основными частями АП являются колонка и тарелка. Колонка включает ползун, направляющую ползуна и вал несущего винта на подшипниках. Управление величиной тяги НВ осуществляется одновременным и одинаковым для всех лопастей изменением углов установки (общего шага). Направление силы тяги изменяется наклоном плоскости вращения НВ за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Тарелка с помощью радиально-упорного подшипника и кардана, образованного наружным и внутренним кольцами, смонтирована на ползуне общего шага и приводится во вращение поводком, соединенным с валом НВ. Ползун с помощью рычага и тяги перемещается в вертикальном направлении по направляющей, смонтированной на корпусе главного редуктора. С помощью тяг продольного и поперечного управления и качалок тарелка может наклоняться в произвольном направлении относительно оси вала НВ. Перемещение ползуна вместе с тарелкой по направляющей вызывает одинаковое изменение углов установки всех лопастей и соответствующее изменение величины силы тяги НВ. Наклон тарелки относительно оси вала НВ вызывает циклическое изменение углов установки лопастей относительно среднего значения шага, определяемого положением ползуна. Наибольший угол установки каждая лопасть будет иметь в том азимуте, в котором ее тяга окажется в наивысшей точке наклоненной тарелки. Циклическое изменение углов установки и соответствующее изменение силы тяги лопастей вызывает их маховое движение, т.е наклон конуса вращения НВ Направление наклона определяется направлением наклона тарелки АП. Чтобы исключить наклон тарелки АП при перемещении ползуна, качалки тяг продольного и поперечного управления закреплены на ползуне и перемещаются вместе с ним. Принципиальная схема АП включает колонку с валом, направляющую ползуна, ползун, подшипник и тарелку автомата перекоса. Тарелка включает тяги продольного и поперечного управления, тяги управления лопастью, поводок, внутреннее кольцо автомата перекоса, наружное кольцо автомата перекоса. Кроме того, АП управляют рычаг общего шага и тяга общего шага.
Недостатки указанного автомата перекоса заключаются в его конструктивной сложности и относительно низкой надежности отдельных узлов. В частности, конструкция тарелки усложнена из-за наличия внутреннего и наружного колец, связанных между собой карданным механизмом, что снижает надежность и ресурс работы тарелки; колонка несущего винта включает коаксиально размещенные друг в друге вал, направляющую ползуна и ползун, что утяжеляет конструкцию. Вал перемещается в направляющей ползуна по подшипнику скольжения, а сам вал в нижнем конце сопрягается с направляющей ползуна посредством шлицевого соединения, что требует дополнительных усилий для преодоления усилия трения в шлицевом соединении.
Предлагаемое изобретение направлено на упрощение конструкции автомата перекоса, увеличение надежности работы тарелки и снижение веса вертолета.
Поставленная задача достигнута тем, что вал в колонке установлен на роликовых подшипниках, а тарелка установлена подвижно на шаровом подшипнике. При этом высота внутренней обоймы роликового подшипника больше высоты наружной обоймы. Внутренняя обойма шарового подшипника закреплена на ползуне, а его наружная обойма составлена из вкладышей, которые сопряжены с шаровой поверхностью внутренней обоймы шарового подшипника. При такой конструкции АП отпадает необходимость в применении направляющей ползуна.
Один из возможных вариантов конструкции автомата перекоса приведен на чертежах. На фиг.1 приведен общий вид автомата перекоса, на фиг.2 приведена конструкция вкладыша.
Автомат перекоса включает колонку несущего винта 1 и тарелку 2. Колонка включает вал 3 НВ, размещенный коаксиально внутри корпуса 4 ползуна. Вал установлен в роликовом подшипнике 5, внутренняя обойма 6 которого по высоте больше, чем наружная обойма 7. Роликовый подшипник выбран потому, что конструктивно его внутренняя обойма может свободно перемещается по роликам вверх и вниз относительно наружной обоймы. В зависимости от длины вала в колонке может быть установлено более двух роликовых подшипников. Для наклона тарелки применен шаровой подшипник. Снаружи ползуна закреплена внутренняя обойма шарового подшипника 8, на которой установлена тарелка 2. Тарелка включает радиально-упорный подшипник, состоящий из внутренней 9 и наружной 10 обойм, и размещенные радиально внутри подшипника вкладыши, выполненные из композитного материала 11 и 12, трущиеся поверхности которых сопряжены с шаровой поверхностью обоймы 8. Снизу и сверху вкладыши зажаты прижимными кольцами 13, опирающимися также на внутреннюю обойму 9. Между собой прижимные кольца стянуты крепежом 14, проходящим через сквозные пазы 15, выполненные во вкладышах. В прижимных кольцах и вкладышах выполнены также пазы 16. Эти пазы необходимы для регулирования усилия прижима вкладышей к шаровой поверхности обоймы 8. Усилие прижима (значит, и величину зазора) юстируют при увеличении зазора между вкладышами и обоймой 8 в процессе износа вкладышей вследствие трения. Усилие прижима регулируют следующим образом. Ослабляют крепеж 14, вставляют в пазы 16 клинья и подбивают их, прижимая вкладыши к обойме 8. После этого затягивают крепеж и извлекают клинья. Усилие прижима контролируют прибором.
К нижнему прижимному кольцу шарнирно прикреплены тяги продольного и поперечного управления 17 и 18, связанные с ручкой управления вертолетом. На наружной обойме 10 радиально-упорного подшипника установлены обечайки 19 и 20, которые скреплены между собой крепежом 21. Верхняя обечайка снабжена шарнирно установленными тягами 22 управления лопастями (в данном случае их три), соединяемые с рычагами поворота лопастей. Ползун 4 имеет возможность передвигаться в вертикальном направлении под воздействием усилия рычага общего шага («шаг-газа») с рукояткой управления коррекцией. При этом ползун, отцентрированный роликовыми подшипниками 5, свободно и с минимальным трением скользит вдоль вала 3 по поверхности внутренней обоймы 6, поднимая и тарелку 2. Следует отметить, что внутренняя обойма 9 радиально-упорного подшипника не вращается вокруг оси вала, а наружная обойма 10 вместе с обечайками и тягами 22 вращается. Наружная обойма 10 и вал 3 связаны поводком (на чертеже не указан), т.е. вращение вала через поводок передается наружной обойме.
Автомат перекоса работает следующим образом.
При помощи рычага общего шага приводятся в действие тяга общего шага, которая через качалку управления общим шагом поднимает ползун 4 вдоль вала 3. При этом поднимается и тарелка 2, установленная на ползуне. Соответственно на одинаковую высоту поднимаются и тяги управления лопастями 22, которые через рычаги поворота лопастей НВ поворачивают вокруг своих осей одновременно все лопасти на один и тот же угол. Так осуществляется управление общим шагом несущего винта.
Направление же силы тяги изменяется наклоном плоскости вращения НВ за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Осуществляется это при помощи ручки управления вертолетом. При этом связанные с ручкой управления тяги продольного и поперечного управления 17 и 18 наклоняют тарелку 2 и тяги 22 относительно оси вала НВ, вызывая циклическое изменение углов установки лопастей относительно среднего значения шага, определяемого положением ползуна 4. Циклическое изменение углов установки и соответствующее изменение силы тяги лопастей вызывает маховое движение лопастей, т.е наклон конуса вращения НВ. Таким образом, направление наклона НВ определяет направление наклона тарелки АП.
Читайте также: