Расчет привода поворотного стола
Обновлено: 03.05.2024
Привод поворотного стола, базирование заготовки по наружному диаметру. Мощность привода позиционера для сварочных операций. Статистический и динамический вращающий момент. Расчет привода главного движения и привода подач технологической оснастки.
| Рубрика | Производство и технологии |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 08.05.2020 |
| Размер файла | 389,9 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ПОВОЛЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ»
по дисциплине: Машиностроительное производство
Расчет и проектирование технологической оснастки «Позиционер для сварочных операций»
Выполнила: Васягина Е.В.
Проверила: Зверева О.С.
Суммарная масса деталей: 40 кг
Суммарная масса стола с зажимными элементами 12% от суммарной массы деталей
Периодичность поворота стола:
Угол поворота стола в плоскости вращения: 120 град;
Угол поворота стола в вертикальной плоскости: 45 град;
Время перемещения между позициями: 6 сек;
Максимальное ускорение: 0,7 м/с 2
до 30 кг = 300 мм(0,15); больше 30 кг = 500 мм(0,25).
1. Привод поворотного стола
где M - масса стола, кг
Iст = * 4,8* 0,25 2 = 0,15 (кг*м 2 )
Базирование заготовки по наружному диаметру стола
Iз = 4 * 40 * 0,25 2 = 10 (кг*м 2 )
Iх = 10 + 0,15 = 10,15 (кг*м 2 )
2. Скорость вращения стола
где a- максимальное ускорение,
t - время перемещения между позициями
- путь прохождения между конечными позициями
3. Число оборотов стола
Округлим до ближайшего целого в меньшую сторону nтеор ?3 об/мин
4. Мощность привода
Nд = = 96*10 -4 (кг*м 2 /мин 3 )
Nст = =0,037=37(кг*м 2 /мин 3 )
5. Статистический вращающий момент и динамический вращающий момент
Расчёт зубчатой передачи
6. Определяем модуль
k? - коэффициент неравномерности по ширине зуба 1ч1,5
kv - коэффициент, зависящий от скорости работы передачи 1ч1,3
q - коэффициент диаметра червякаq=10
г - угол наклона червякаг =15°
[уизг] - допустимый предел прочности материала на изгиб
Электродвигатель выбираем по крутящему моменту
Принимаем рекомендованное табличное значение 3 кВт
Используем ЭД АИР90L2
7. Расчёт вала по диаметру
[дизг] = , следовательно == 375 мм 2
, следовательно,= 15 мм
8. Расчёт шпоночного паза
Определяем шпонки по контактным напряжениям
Мкр - крутящий момент
К - 0,75 - неравномерность по длине шпонки
Если условие не выполняется, то добавляется с(количество опорных граней). Будет ясно это шпонка или шлиц.
технологическая оснастка позиционер сварочный
9. Расчёт гидроцилиндра
Dц - диаметр цилиндра
с - давление масла в цилиндре 2,5ч6,3
10.Расчёт привода главного движения и привод подач
P = ?m = 44,8 (кг)=439 (Н)
Сталь 10 = 65 МПа
Сталь 40Х- по материалу стакана подшипника =>
11. Расчет корпуса
Подобные документы
Разработка кинематики привода подач и привода главного движения токарно-винторезного станка. Определение назначения станка, расчет технических характеристик. Расчет пары зубчатых колес. Разработка кинематики коробки подач, редуктора и шпиндельного узла.
курсовая работа [970,1 K], добавлен 05.11.2012
Выбор режимов резания на токарных станках. Эффективная мощность привода станка. Выбор типа и кинематической схемы механизма главного движения. Расчет коробки скоростей, основных конструктивных параметров деталей привода. Определение чисел зубьев шестерен.
курсовая работа [874,8 K], добавлен 20.02.2013
Обоснование технической характеристики проектируемого станка, подбор и анализ существующих аналогов, расчет числа ступеней привода и выбор электродвигателя. Кинематический расчет привода главного движения. Выбор электрических муфт и подшипников.
курсовая работа [338,2 K], добавлен 14.04.2015
Параметры системы для реализации технологического процесса. Расчет поворотного привода, редуктора поворотного привода, наклонного привода. Структура системы управления лазерным комплексом и её разработка. Разработка схемы электрических соединений.
дипломная работа [1,0 M], добавлен 16.08.2015
Назначение станка и область применения. Выбор структуры привода главного движения. Определение технических характеристик станка. Силовой, прочностной расчет основных элементов привода главного движения. Проверочный расчёт подшипников и валов на прочность.
Расчет поворотного привода
Двигатель (поворотный стол) серии RT24-93-HS с полым роторомсостоит из неподвижного статора с залитой теплопроводящим компаундом трехфазной системой обмоток и вращающегося ротора. Равномерность перемещения и точность позиционирования достигается синусоидальной модуляцией токов статора и регулированием их амплитуды сервоконтроллером в зависимости от рассогласования по положению.
Делительный стол предназначен для быстрых поворотов в режиме старт - стоп. Четырехточечный радиально упорный подшипник отличается высокой жесткостью, допускает нагрузку в любом направлении и любое расположение оси вращения (вертикальное, горизонтальное, под углом, вверх ногами). Вращение стола с максимальной частотой 1400 об/мин
1.Определение необходимых величин для выбора двигателя:
1.1. Определение вращающего момента.
Вращающий момент М будет равен:
∑m - сумма масс двигателя, направляющих, зеркала и болтов, кг
где, mд- масса двигателя;
mн- масса направляющих;
g=9,81 м/с 2 - ускорение свободного падения,
r - плечо момента, r=20 мм=0,2 м.
Отсюда получаем, что вращающий момент равен
М=4кг∙9,81м/с 2 ∙0,2м=7,8 Н∙м.
1.2.Определение частоты вращения и угловой скорости.
Угловая скорость определится, как
где n – требуемая частота вращения, об/мин.
где – линейная скорость обработки; = 0,05 м/с.
– длина обрабатываемой зоны детали.
В нашем случае она будет определяться, как
где – диаметр обрабатываемой детали, =0,4 м.
Но регулируемая частота должна быть больше:
1.3.Определение времени разгона и ускорения нагрузки.
Ускорение нагрузки находится по формуле
– время разгона двигателя.
Время разгона tразг определяется, как
- линейная скорость обработки; = 0,05 м/с.
а - заданное ускорение; а=0,5 м/с 2 .
1.4.Определение момента инерции нагрузки.
Вычислим момент инерции нагрузки по формуле
М – вращающий момент; М=33 Н∙м,
tразг – время разгона двигателя,
ω – угловое ускорение.
1.5.Определение мощности двигателя.
Мощность двигателя определяется как
Рдин - динамическая мощность,
Рст - статическая мощность.
Динамическая мощность находится по формуле
Статическая мощность находится по формуле
∑m - сумма масс двигателя, направляющих, зеркала и болтов; ∑m=4кг,
m=0,1 - коэффициент трения качения,
r - плечо момента, r=0,2м,
n - требуемая частота вращения, 2,4 об/мин.
Значит, что мощность двигателя должна превышать
2. Выбор двигателя.
2.1. Расчет дополнительных характеристик двигателя.
Внешний момент инерции JВ вычислим по формуле:
J- момент инерции нагрузки;
n- частота вращения нагрузки;
nМ- максимальная частота вращения.
Рассчитаем статический вращающий момент:
Динамический момент находится по формуле:
Jд - момент инерции двигателя, Jд=0,002 кг∙м 2 ;
JВ - внешний момент инерции;
nМ- максимальная частота вращения;
tразг - время разгона двигателя;
Мст - статический вращающий момент.
Получаем, что динамический момент равен:
Номинальный вращающий момент МN, определяется как:
При этом обеспечивается надежный разгон.
3. Проверка точности остановки.
Двигатель останавливается механическим тормозом, а время торможения вычисляется по формуле:
Мп - пусковой вращающий момент, Мп=13,6 Н м
При этом замедление при торможении равно:
График разгона и торможения представлен на рис. 4.2.
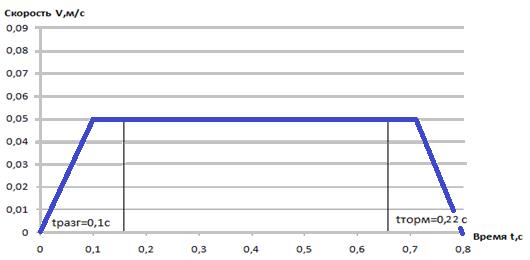
Рис. 4.2. График разгона и торможения двигателя поворотного привода.
Длина тормозного пути находится как:
где V- линейная скорость обработки;
tторм- время торможения;
tх- время торможения обеспечиваемое двигателем на холостом ходу, tх=0,003с.
Масса детали(вал карданный) составляет 40 кг - берем с запасом для увеличения прочностных и др. характеристик привода, диаметр вала 84,5 мм, а длинна вала 850 мм согласно конструкторской документации. Коэффициент трения качения =0,1. Задаем линейную скорость вращения вала =80 мм/с=0,08 м/с. Максимальное ускорение недолжно превышать 0,5 м/с 2 . Масса вращающего диска равна 50 кг, диаметр диска 235 мм, а его толщена 110 мм. Масса патрона 5 кг, диаметр патрона 100 мм, а его толщена 40 мм. Допустимое отклонение положения составляет ±2мм. Упрощенная схема вращения вала, для расчета, представлена на рис.4.1.

Рис.4.1. Схема вращения вала
1. Определение необходимых величин для выбора двигателя:
Как видно из схемы(Рис.4.1) вращающий момент М будет равен:
?m - сумма масс диска, патрона и заготовки, кг
r - плечо момента, r=235 мм=0,235 м.
М=95кг•9,81м/с 2 •0,235м=219 Н•м.
1.2. Определение частоты вращения и угловой скорости.
где n - требуемая частота вращения, об/мин.
где - линейная скорость обработки; = 0,08 м/с.
- длина обрабатываемой зоны детали.
где - диаметр обрабатываемой детали, =0,0845 м.
1.3. Определение времени разгона и ускорения нагрузки.
- время разгона двигателя.
Время разгона tразг определяется, как
- линейная скорость обработки; = 0,08 м/с.
а - заданное ускорение; а=0,5 м/с 2 .
1.4. Определение момента инерции нагрузки.
М - вращающий момент; М=219 Н•м,
tразг - время разгона двигателя,
щ - угловое ускорение.
1.5. Определение мощности двигателя.
?m - сумма масс диска, патрона и заготовки, ?m=95кг,
=0,1 - коэффициент трения качения,
r - плечо момента, r=0,235м,
n - требуемая частота вращения, 18,1 об/мин.

2.1. Выбираем двигатель соответствующий рассчитанным параметрам.
Технические характеристики асинхронного трехфазного электродвигателя типа АИР80B16:
Мощность - 0,55 кВт;
Максимальная частота вращения - 350 об/мин;
Момент инерции двигателя - 0,09 кг•м 2 ;
Пусковой вращающий момент - 36 Н м.
2.2. Расчет дополнительных характеристик двигателя.
J - момент инерции нагрузки;
n - частота вращения нагрузки;
nМ - максимальная частота вращения.
Jд - момент инерции двигателя, Jд=0,09 кг•м 2 ;
nМ - максимальная частота вращения;
tразг - время разгона двигателя;
Мп - пусковой вращающий момент, Мп=36 Н м

где V - линейная скорость обработки;
tторм - время торможения;
tх - время торможения обеспечиваемое двигателем на холостом ходу, tх=0,003с.
А точность остановки равна:
Стоит отметить, что в данном значении учитывается время наложения тормоза, но не учитываются внешние причины возможной задержки.
Расчет редуктора поворотного привода
Редуктор необходим для понижения частоты вращения и увеличения момента в приводе. Для этой цели выберем червячный редуктор.
Для выбора подходящего редуктора необходимо определить передаточное число. Сделать это можно применяя следующее выражение:
где Jд- момент инерции двигателя, Jд=0,09 кг•м 2 ;
Значит передаточное число i редуктора равно:
Так как такое значение передаточного числа не корректное принимаем его равным 16.
Выбираем редуктор червячный NMRV030-16-0,55.
Передаточное число - 16;
Проектный расчет червячной передачи произведен в компьютерной программе КОМПАС V13, библиотека КОМПАС - Shaft 2D для расчета механических передач. Результаты расчета приведены в табл. 4.1
Проектный расчет цилиндрической червячной передачи.
Расчет наклонного привода

Расчет наклонного привода осуществляется по тем же исходным данным, за исключением линейной скорости вращения вала, которая в данном случае принимается равной =150 мм/с=0,15 м/с, и с учетом стола, масса которого равна 250 кг, а длинна 300 мм.
Упрощенная схема наклона вала, для расчета, представлена на рис.4.3.
Рис.4.3. Схема наклона вала
Как видно из схемы(Рис.4.2) вращающий момент М будет равен:
?m - сумма масс стола, диска, патрона и заготовки, кг
d - плечо момента, равный
М=345кг•9,81м/с 2 •1,3м=4458,8 Н•м.
где - линейная скорость обработки; = 0,15 м/с.
где - длинна обрабатываемой детали, =0,850 м.
- линейная скорость обработки; = 0,15 м/с.
М - вращающий момент; М=4458,8 Н•м,
?m - сумма масс диска, патрона и заготовки, ?m=345кг,
d - плечо момента, d=1,3м,
n - требуемая частота вращения, 3,7 об/мин.
Технические характеристики асинхронного трехфазного электродвигателя типа АИР90M16:
Мощность - 2,2 кВт;
Момент инерции двигателя - 0,1 кг•м 2 ;
Пусковой вращающий момент - 150 Н м.
Jд - момент инерции двигателя, Jд=0,1 кг•м 2 ;
Мп - пусковой вращающий момент, Мп=130 Н м
График разгона и торможения представлен на рис. 4.4.

Рис. 4.4. График разгона и торможения двигателя наклонного привода.
Разработка привода вращения карусельного стола пресса
Карусельный стол является одной из основных частей пресса. Непосредственно пресс включает в себя цельносварную двухстоечную станину с закрепленными в ее верхней части плоскими направляющими, в которых размещен механизм, состоящий из ползуна, его автоматизации перемещения и удержания в верхнем положении при ремонтных работах. Станина конструкции арочного типа выполнена из листового проката и служит для восприятия усилия деформирования и установки основных узлов пресса. На основании станины пресса на поворотной опоре соосно с одной из стоек станины смонтирован карусельный стол с тремя инструментальными позициями для установки основного инструмента. Инструмент крепится на столе, который оснащен приводами вращения. Каждый из столов в рабочей зоне фиксируется двумя боковыми пружинными цилиндрами и одним центральным фиксатором. Для того, чтобы сменить инструмент, необходимо расфиксировать инструментальную позицию, развернуть карусельный стол так, чтобы новая инструментальная позиция разместилась в рабочей зоне пресса, и зафиксировать эту позицию в рабочем положении.
Принципиальная схема привода вращения карусельного стола пресса приведена на рисунке 2.1.
Рисунок 2.1 - Принципиальная схема привода вращения карусельного стола
Разработка и описание кинематической схемы привода
В данном узле, механизм вращения стола выполнен с передачами в две ступени. Первая ступень составляет червячный редуктор, вторая - открытая цилиндрическая зубчатая передача. Предлагаемая в данной работе схема позволяет использовать стандартный редуктор, что бесспорно будет упрощать изготовление и окончательную сборку полного механизма в заводских условиях. Быстроходный вал редуктора соединяется с выходным концом вала гидромотора с помощью втулочно-пальцевой муфты. Ведущее зубчатое колесо открытой зубчатой цилиндрической передачи соединено с тихоходным валом редуктора с помощью втулочно-пальцевой муфты.
Вращение от открытой зубчатой цилиндрической передачи передается столу карусельному, который жестко соединен с ведомым зубчатым колесом.
Кинематическая схема привода вращения карусельного стола пресса приведена на рисунке 2.2.

Рисунок 2.2 - Кинематическая схема привода
1 - гидромотор; 2 - муфта; 3 - червячный редуктор; 4 - муфта; 5 - открытая цилиндрическая зубчатая передача; 6 - стол карусельный;
ГМ, 1, 2, 3, ВРМ - валы привода.
Энергокинематический расчет привода
- скорость перемещения стола V=0,4 м/с;
- окружная сила стола Ft =5 000 Н;
- диаметр центров оснастки стола D = 1540 мм.
Определяем требуемую мощность на валу кaрусельного стола
Рр.м. = Ft*V, кВт, (2.1)
где Ft - окружная сила 5 000 Н;
V - скорость перемещения стола 0,4 м/с.
Рр.м. = 5 000*0,4 = 2 000 Вт = 2 кВт.
Определяем общий коэффициент полезного действия привода
Чтобы определить общий КПД привода, нужно установить источники потери мощности, анализируя кинематическую схему привода.
В приводе карусельного стола к источникам потери мощности относятся: муфты, открытая цилиндрическая передача, червячная передача, подшипники качения.
- КПД подшипников качения;
- КПД цилиндрической передачи;
- КПД червячной передачи.
Значения КПД передач и подшипников качения принимаем по литературе [19, с. 40] таблица 2.2
Определяем требуемую мощность гидромотора
где - мощность на валу стола карусельного, кВт;
- общий коэффициент полезного действия.
Выбор гидромотора
Выбираем из справочника [13, с. 145] серию гидромоторов типа Г15 по ТУ2-053-1771-86 и зададимся частотой вращения мин-1.
где - частота вращения, мин-1.
Необходимый крутящий момент гидромотора:
Исходя из полученных данных выбираем гидромотор: Г15-24Р ТУ2-053-1771-86
Технические характеристики гидромотора:
Рабочее давление - 6,3 МПа;
Рабочий объем - 80 см3;
Крутящий момент на выходном валу - 68 Н·м.
Определяем передаточные числа привода
Требуемая частота вращения карусельного стола:
Требуемое передаточное число привода:
где - номинальная частота вращения вала гидромотора, об/мин;
- частота вращения стола карусельного, об/мин.
Задаемся передаточным числом редуктора.
Принимаем в связи с особенностью устройства червячный редуктор с передаточным числом Uр = 22,5 пользуясь справочником [9, с. 68]:
Тогда общее передаточное число цилиндрической передачи находим следующим образом:
Читайте также: