Шкаф управления лифтом схема
Обновлено: 05.05.2024
Выявление неисправностей в электрических схемах лифтов я причин, вызвавших эти неисправности, возможно только при условии четкого знания электросхем и свободного чтения их.
В электрических схемах лифтов различают следующие основные цепи: силовые, управляющие непосредственно электроприводом, и цепи управления, включающие электроаппараты.
В настоящей книге приведены принципиальные электрические схемы управления пассажирскими лифтами наиболее распространенных типов.
При описании электрических схем приняты следующие допущения:
опускаются отдельные участки цепей в тех случаях, если они уже рассматривались;
в обозначениях н. з. (нормально закрытый) или н. о (нормально открытый) слово контакт опускают;
при срабатывании (включении) реле или контактора замыкаются их и.о. контакты и размыкаются н. з. При отпускании якоря реле или контактора (выключении), наоборот, размыкаются н. о. и замыкаются н. з. контакты;
реле времени при отключении катушки от источника питания отпускают свой якорь, предварительно отработав выдержку времени. Н. з. контакты таких реле замыкаются, а н. о. размыкаются по истечении установленной выдержки времени. Выдержка времени может регулироваться в заданных пределах;
реле, катушки которых шунтированы последовательно соединенными сопротивлением и емкостью, отпускают свой якорь при отключении катушки от источника питания после отработки выдержки времени. Выдержка времени зависит от параметров шунтирующей цепи, катушки реле и регулировке не подлежит;
для кнопок с удерживающими электромагнитами в описании под выражением «Кнопка залипает» следует понимать «Кнопка удерживается во включенном положении»;
попутными считают остановки, которые делают кабины при ее движении к ранее заданному этажу.
В табл. 2.1, 2.2 приведены буквенные и графические обозначения в электрических схемах.
Таблица 2.1
Перечень элементов электросхем, их обозначение, назначение н местонахождение
Блок-контакт замка две- ри
Контролирует запирание замка двери шахты
Конечный включатель переподъема
Выключает цепь управления при прохождении кабиной уровня точной остановки верхнего этажа свыше 150 мм
Конечный выключатель перепуска
Выключает цепь управления при прохождении кабины уровня точной остановки нижней этажной площадки свыше 150 мм
Контроль положения кабины в шахте, выбор направления и подачи импульса на замедление
Контроль положения кабины, выбор направления и подачи импульса на замедление
Выключатель цепи управления
Выключение цепи управления при работах в приямке
Контакт натяжного устройства
Отключение цепи управления при ослаблении или обрыве каната ограничителя скорости
Звонок вызова обслуживающего персонала
Вызов обслуживающего персонала
Трехфазный асинхронный электродвигатель привода дверей, с короткозамкнутым ротором
Для привода открытия и закрьпия дверей
Датчик точной остановки
Дает импульс на остановку кабины при прохождении его на малой скорости мимо шунта расположенного в шах- те
Отключает цепь управления при срабатывании ловителей
Контакт слабины подъемных канатов
Предотвращение возможности работы лифта, если один или несколько канатов недопустимо ослабли или оборвались
Место- н а хождение
Остановка кабины из ее купе
Блокировочный контакт дверей кабины
Контроль закрытия кя- бинных дверей
Контролируют нахождение пассажира в кабине
Выключатель конечный открытия дверей
Отключение приводного двигателя прииода дверей в момент их полного открытия
Выключатель конечный закрытия дверей
Отключение двигателя привода дверей в момент их полного закрытия
Выключатель конечный реверса дверей
При защемлении пассажира дверями в момент их закрытия, отключает реле ЗД и включает реле ОД
Контакт точной остановки
Удержание во включенном состоянии контакторов В или Н, при переключении электродвигателя с большой на малую скорость и для остановки кабины иа уровне точной остановки
Контакт ограничителя грузоподъемности
Исключает остановки кабины по попутным вызовам при полной ее загрузке
Исключает закрытие дверей и пуск лифта при перегрузке кабины
Штепсельные разъемы режимов работ
Перевод лифта g режим ревизии или нормальной работы
Кнопки двухкнопочного поста управления
Управление лифтом с крыши кабины в режиме ревизии
Снижение рабочего тока иа катушке электромагнита кнопки КП
Световой сигнал «Лифт перегружен»
Загорается в случае перегрузки кабины при нажатии кнопки приказа
Лампа освещения кабины
Включается при открытии двери шахты или нахождении пассажира в кабине
Лампа аварийного освещения
Обеспечивает необходимую освещенность в купе кабины при выключении лампы ОК
Кнопка вызова обслуживающего персонала
Включение электрического звонка ЗВП
Штепсельная розетка кабины
Выключатель цепи управлении
Отключение цепи управления с первого этажа
Лестничная площадка пер* вого этажа
Переключатель режима работ
Перевод лифта в погрузочный режим
Кнопка включения и отключения
Включение и отключение лифта с первого этажа
Световой указатель о местонахождении кабины
КВ, квв, квн
Вызов кабины и открытие дверей при нахождении кабины иа том же этаже, где нажата кнопка
Снижение рабочего тока иа катушке электромагнита кнопки КВ
Включаютси при движении кабины, при открытии двери шахты и нахождении пассажира в кабине
Световые сигналы «Вверх» и «Вниз»
Указывают направление движения кабины
Таблице 2.2
Условные графические обозначения в электрических схемах в соответствии с действующими государственными стандартами
АППАРАТУРА УПРАВЛЕНИЯ ЛИФТА
К аппаратуре управления относятся контакторы, реле, вызывные аппараты, лифтовые панели. Контакторы и реле смонтированы в металлическом шкафу, установленном в машинном помещении,— шкафу управления. Там же установлены выключатели и предохранители, конденсаторы и добавочные сопротивления. Шкаф, являясь экраном для токов высокой частоты, возникающих при размыкании контактов, снижает помехи для радиоприемников и телевизоров.
Реле, подобно контактору, имеет магнитную с подвижным якорем и контактную системы (рис. 1.18). При включении катушки якорь притягивается к сердечнику и изменяет состояние контактов (контакт а размыкается, контакт б замыкается).
Различают реле напряжения и реле тока. Катушка реле напряжения (на схеме обозначается прямоугольником) имеет несколько тысяч витков из тонкого медного провода. Сопротивление катушки велико, ее можно включить на напряжение 110 В (рис. 1 19, а).
Катушка реле тока (в ее обозначение на схеме вписана буква /) состоит из нескольких витков толстого провода. Реле можно включить только последовательно с каким-либо другим прибором, например с электромагнитом тормоза (рис. 1.19, б).
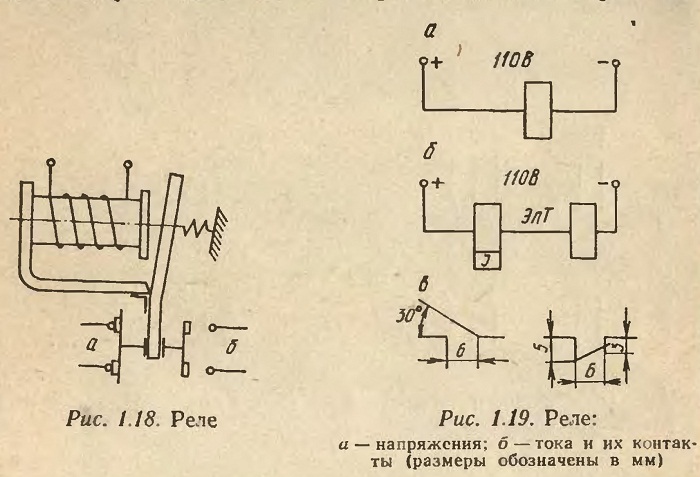
Контакты реле, замыкающие и размыкающие, обозначаются на схемах одинаково, независимо от вида реле (рис. 1.19, в).
Наиболее часто используются следующие типы реле: РЭ-500, РЭВ-800, РП-23, РП-40, РПУ-1, ПЭ-21.
Реле времени (рис. 1.20) обеспечивают включение аппаратуры в определенной последовательности. В отличие от реле напряжения они имеют на сердечнике массивную медную или алюминиевую гильзу. После отключения катушки исчезающий магнитный поток наводит в гильзе, как в короткозамкнутом витке, эдс и ток. Последний создает свой магнитный поток, и якорь удерживается некоторое время в притянутом состоянии.
Поэтому замыкающий контакт переходит в разомкнутое состояние не сразу: он обеспечивает выдержку времени при размыкании. Размыкающий контакт при возврате из разомкнутого состояния обеспечивает выдержку времени при замыкании
Для создания выдержки времени параллельно с катушкой реле можно подключить конденсатор (рис. 1.21). Когда катушка включена, напряжение конденсатора равно напряжению сети. После размыкания цепи конденсатор разряжается на катушку реле, подпитывая ее определенное время. Выдержка времени регулируется изменением емкости конденсатора С. Сопротивление R ограничивает ток зарядки конденсатора.
Вызывные аппараты используются для вызова кабины на этаж. Вызывной аппарат ВП-31, установленный на этажной площадке, имеет одну кнопку с самовозвратом, с одним замыкающим контактом. В штифт кнопки
встроена лампа «Занято». Она находится в схеме сигнализации и включается через добавочное сопротивление на 24 В переменного напряжения.
Применяются и другие типы вызывных аппаратов. Например, в грузовых, больничных и малых грузовых лифтах с числом остановок больше двух установлен вызывной аппарат ВП-70; его кнопка с самовозвратом имеет два замыкающих контакта.
Лифтовые панели устанавливаются в кабине. На панели типа ПЛ-2300УЗ смонтированы кнопки приказа, кнопка «Стоп», кнопка вызова обслуживающего персонала КнВП.
Кнопка приказа представляет собой кнопку с самовозвратом с одним замыкающим контактом. Число кнопок приказа равно числу этажей.
Электрооборудование лифтов

Лифт представляет собой подъемную машину циклического действия, предназначенную для вертикального подъема людей и грузов. По назначению лифты разделяют на пассажирские, грузопассажирские, больничные, грузовые.
В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6м/с), скоростные (от 2 до 4м/с) и высокоскоростные (4 - 10м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых - от 160-5000кг. При скорости до 1,6м/с электродвигатель соединяется с канатоведущим шкивом через редуктор, если скорость выше, то применяют безредукторные электроприводы.

При большом разнообразии вариантов конструкций пассажирских и грузовых лифтов основными узлами оборудования для них являются подъемная лебедка, канаты, кабина, противовес, механический тормоз и аппаратура управления. Современные лифты имеют систему подвеса с противовесом и с уравновешивающим канатом.

Кабина перемещается вдоль вертикальных направляющих. Кабина подвешена к канатам, огибающим канатоведущий и направляющий шкивы приводной электрической лебедки. На концах каната укреплен противовес, движущийся по направляющим. Масса противовеса равна сумме массы кабины и (0,42 - 0,5) массы груза (или половине наиболее вероятной нагрузки кабины).
В лифтах и грузовых подъемниках типы электроприводов выбираются в зависимости от скорости движения, этажности здания и требуемой точности остановки. В настоящее время применяют следующие электроприводы:
а) для зданий до 17 этажей используются тихоходные и быстроходные лифты со скоростью от 0,7 до 1,4м/с грузоподъемностью 320, 400кг. В этих лифтах применяют электропривод с асинхронным двухскоростным электродвигателем с короткозамкнутым ротором,
б) для быстроходных пассажирских лифтов со скоростью 1,6м/с предназначенных для зданий до 25 этажей применяют электропривод по системе тиристорный регулятор напряжения (ТРН) с двухскоростным асинхронным двигателем (ТРН-АДД).

Наличие регулируемого электропривода обеспечивает высокую плавность процессов разгона и замедления, высокую точность остановки на этаже (до 20 мм), отсутствие участка пониженной скорости перед остановкой. Вторая обмотка двигателя служит для получения малой скорости при ревизии,
в) для скоростных и высокоскоростных лифтов применяются электроприводы постоянного тока по системе тиристорный преобразователь-двигатель ТП-Д и переменного тока по системе преобразователь частоты - короткозамкнутый асинхронный электродвигатель ГГЧ-АД.
Тиристорный электропривод лифта типа УЛМП-25-16
Питание электропривода (рис.1) осуществляется от реверсивного тиристорного регулятора напряжения UZ (ТРН) при пуске и установившемся движении и от отдельного выпрямителя собранного по однофазной мостовой схеме UZ1 для питания обмотки статора при динамическом торможении.
Система обеспечивает параметрическое фазовое регулирование скорости вращения короткозамкнутого асинхронного электродвигателя. Система автоматического регулирования выполнена на однокристальной микро ЭВМ типа КР1816ВБ031, которая осуществляет непосредственное цифровое регулирование скорости вращения приводного двухскоростного асинхронного электродвигателя.
Автоматическая система регулирования позволяет обеспечить высокую точность поддержания заданной скорости и остановки на уровне требуемого этажа непосредственно в заданную точку без участка пониженной скорости. Вторая обмотка двигателя включается только при ревизии.
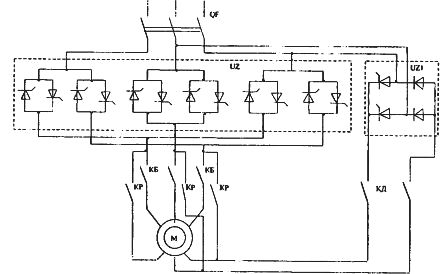
Рис. 1. Схема тиристорного электропривода лифта
Грузоподъемные механизмы лифтов снабжаются специальными тормозными устройствами с длинноходовыми и короткоходовыми электромагнитами постоянного тока, которые подключаются к сети напряжением 220 или 380 В через выпрямитель.
Аппараты управления лифтов
Этажные переключатели предназначены для коммутации цепей управление движением. Они регистрируют положение кабины, автоматически выбирают направление движения ("верх" или "низ") и дают команду на отключение электропривода при остановке. Конструктивно это трехпознцнонные рычажные переключатели (путевые командоаппараты) на три положения (1-0-2), имеющие подвижные (на рычаге) к неподвижные (на корпусе) контакты.
Этажные переключатели устанавливаются в шахте на уровне этажа, а на кабине — фасонная отводка, которая действует на рычаг этажного переключателя.
При ходе кабины "вверх" поворотом рычага замыкается одна группа неподвижных контактов, а "вниз"— другая. Когда кабина находится на уровне этажа, этажный переключатель находится в нейтральном положении "О", а неподвижные контакты разомкнуты.

Переключатели скорости предназначены для подачи импульса на снижение скорости перед остановкой кабины. Применяются в быстроходных лифта с электроприводом двухскоростного исполнения. Они построены по принципу действия этажных переключателей, но конструктивный вид имеют другой. Переключатели скорости устанавливаются в стволе шахты комплектно выше и ниже этажа на расстоянии от 0,5 до 0,6 м.
Рычажные переключатели предназначены для управлении грузовыми лифтами с проводником. Конструктивно это трехпозицнонные рычажные переключатели с самовозвратом рукоятки в нейтральнее положение ("верх"-0-"низ"), установленные в кабине. Поворотом рукоятки выбирается направлен не движения, что достигается замыканием пары неподвижных контактов. При отпускании рукоятки контакты размыкаются и двигатель останавливается (отключается). Рычажные переключатели одновременно используется как конечный выключатель в крайних положениях кабины. Это достигается действием на ролик рычага специальных направляющих в стволе шахты.
Индуктивные датчики предназначены для применения в быстроходных лифтах. Схема таких датчиков на переменном и выпрямленном токе показана на рис. 2.

Рис. 2. Принципиальная электрическая схема индуктивных датчиков на переменном (а) и выпрямленном (б) токе
В стволе шахты устанавливается П-образный шихтованный магнитопровод из стали 3, а на кабине стальная скоба 4 представляющая собой магнитный шунт. На магнитопроводе находится катушка с обмоткой 2 к которой подключается реле управления 1 непосредственно или через выпрямитель Вп. При уходе скобы (магнитопровод размыкается) индуктивное сопротивление катушки мало, что обеспечит срабатывание реле управления. Если стальная скоба перекрывает магнитопровод, резко возрастает индуктивное сопротивление катушки и реле отпускает.
Надежность и четкость срабатывания реле управления обеспечена включением емкости С параллельно катушке, которая выбирается из условия получения близкого к резонансу токов режима. Применение выпрямителя для питания реле управления повышает надежность срабатывания магнитной системы реле.
Кроме того, в путевых датчиках нашли широкое применение устройства с герметичными контактами (герконы). Применение индуктивных датчиков устраняет такие недостатки этажных переключателей и переключателей скорости, как шумность и радиопомехи, возникающие при работа контактных устройств.
Магнитная отводка - это электромагнитное устройство, устанавливаемое на кабине и контролирующее работу замков дверей шахты. Упор магнитной отводки соединен с якорем электромагнита отводки. При нахождении кабины на этаже электромагнит отводки обесточен, упор под действием пружины отводит защелку замка двери шахты, позволяя ее открыть.
При движении электромагнит отводки под питанием — защелка введена, что запрещает открытие двери. Такие защелки применяются в лифтах старой конструкции (или модернизированных) с ручным приводом дверей шахты.

Основным отличием работы лифтов и подъемников является их многопозиционность, выражающаяся в том, что механизмы могут занимать большое число фиксированных положений. Поэтому после каждой остановки приходится решать логическую задачу о выборе последующего перемещения. Решение этой задач в настоящее время осуществляется с помощью логических микросхем и микропроцессоров. Перед схемой управления лифтами ставятся следующие задачи: контроль положения кабины в шахте, автоматический выбор направления движения, определение времени начала торможения, точной остановки кабины на этаже, автоматического открывания и закрывания дверей и защиты электроприводов и лифта.
Командные сигналы, задающие программу движения кабины, разделяются на два типа: "приказы", поступающие из кабины, и "вызовы", поступающие с этажных площадок. Команды подаются кнопками, расположенными соответственно в кабине и на этажных площадках. В зависимости от реакции на команды и способы их отработки различаются схемы раздельного и собирательного управления. При раздельном принципе управления схема воспринимает и отрабатывает только одну команду и во время ее выполнения не реагирует на другие приказы и вызовы.
Такая схема наиболее проста в реализации, но ограничивает возможную производительность лифта и поэтому применяется лишь для лифтов жилых домов высотой до девяти этажей с относительно небольшим потоком пассажиров. При собирательном принципе управления схема воспринимает одновременно несколько команд и выполняет их в определенной очередности, обычно в порядке следования этажей.

Основой системы управления лифтами является поэтажный тактовый опрос. Тактовый опрос может быть маятниковым, когда опрос производится в двух направлениях, снизу вверх и сверху вниз и одного направления, например, только сверху вниз. Чаще применяется маятниковый опрос.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Схемы управления электроприводами лифтов

В зависимости от быстроходности пассажирских лифтов приняты следующие разновидности силовых схем управления ими:
тихоходные лифты имеют двигатели с короткозамкнутым или с фазным ротором и кнопочное или рычажное управление,
быстроходные лифты - двух или односкоростные двигатели, управляемые магнитными станциями или тиристорными станциями управления (ТСУ-Р) с кнопочными командоаппаратами,
скоростные и высокоскоростные лифты — двигатели постоянного тока, управляемые по системе "генератор — двигатель" с различными схемами возбуждения или по системе "тиристорный преобразователь — двигатель" с кнопочными командоаппаратами,
могут использоваться также схемы асинхронно-вентильных каскадов (АВК), применение которых позволяет увеличить к.п.д. установки.
Пассажирские лифты в зависимости от пассажиропотока, высоты подъема и количества лифтов, обслуживающих пассажиров, разделяются на одиночные и с групповым управлением.
К одиночным относятся:
а) лифты, работающие по единичным приказам и вызовам без попутных остановок при спуске и подъеме пассажиров,
б) лифты с собиранием пассажиров при спуске, но с запрещением вызовов при подъеме,
в) то же, но с регистрацией вызовов на спуске с последующим их исполнением.
К лифтам с групповым управлением относятся:
а) лифты с одной вызывной кнопкой на посадочных площадках независимо от количества установленных лифтов (чаще используется парное управление) и с собиранием пассажиров при спуске,
б) то же, но с полным собиранием пассажиров на промежуточных этажах на подъем и спуск (обычно устанавливаются в административных, учебных и других зданиях).
Кроме того, очень часто используется диспетчеризация лифтов ряда домов и целых районов, когда с одного диспетчерского пульта осуществляется контроль состояния схем и производится управление несколькими лифтами.
Независимо от быстроходности лифтов, одиночного или группового управления ими необходимыми элементами большинства их схем являются следующие:
кнопки с самовозвратом, залипающие или западающие кнопки для вызова кабин и подачи приказа из кабины,
различные датчики селекции и точной остановки — позиционно согласующие устройства для регистрации места нахождения кабины и состояния электрических цепей,
датчики и блокировки состояния подъемных канатов, состояния дверей шахты и кабины (открыты или закрыты),
конечные выключатели ограничения скорости и степени загрузки кабины,
указатели направления движения кабины и в некоторых лифтах наличия груза в кабине.
Из названных элементов более подробно остановимся на позиционно-согласующих устройствах (ПСУ), которые определяют место, где должна остановиться кабина в шахте при появлении вызова или приказа, и движение ее вверх или вниз. Остальные же элементы обычно представляют собой различные модификации конечных выключателей, известных из других курсов.
Конструктивно позиционно-согласующие устройства выполняют в виде набора трехпозиционных электромеханических или индуктивных либо магнитных (герконовых) датчиков, размещенных в шахтах, с выводом сигналов на релейный или бесконтактный селектор в машинное помещение (ПСУ иногда выполняются в виде центральных этажных аппаратов, размещаемых в машинном помещении).
Датчики, размещаемые в шахте, взаимодействуют с установленными на кабине отводками (при электромеханических) или магнитными шунтами (при индуктивных или герконовых датчиках) и выдают сигналы в центральный этажный аппарат (шаговый копираппарат или релейный селектор), установленный в машинном помещении, а последний передает и схему управления сигнал на исполнение полученной команды.
Датчики сигналов о движении кабины вверх или вниз целесообразнее размещать на кабине (требуется меньше проводов), а магнитные шунты устанавливать в шахтах в требуемых точках. В этом случае при цифровом управлении число столбцов устанавливаемых шунтов по шахте равно числу разрядов передаваемого номера этажа в двоичном или ином коде.
Трехпозиционные электромеханические переключатели фигурной отводкой переводятся в одно из положений, соответствующее движению кабины вверх или вниз, либо ее остановке. В этом случае при движении кабины контакты переключателей пройденных этажей включаются в одно из крайних положений, подготавливая к действию цепи вызовов и приказов, а при остановке кабины переключатель переводится в среднее положение, отключая цепь управления от контакторов направления и исключая тем самым уход кабины с этажа при ошибочном нажатии кнопки приказа или вызова.
Для обеспечения относительно точной остановки кабины лифта в схемах управления ими в последнее время стали применять бесконтактные индуктивные или контактные герметизированные магнитоуправляемые (герконовые) датчики. Эти датчики устанавливают как в шахте, так и на кабине: в шахте — датчики селекции (замедления), а на кабине - датчик точной остановки. Для взаимодействия с датчиками на кабине размещают ферромагнитный шунт селекции, а в шахте (на каждом этаже) - ферромагнитные шунты точной остановки.
Индуктивные датчики состоят из разомкнутого П-образного магнитопровода с катушкой, заключенной в кожух. Последовательно с ней включается катушка исполнительного реле, и на них подается напряжение переменного тока (U).
При разомкнутом магнитопроводе магнитный поток, пересекающий катушку, мал. Поэтому э.д.с. и ток самоиндукции в проводниках катушки, а также обусловленное им индуктивное сопротивление (X) практически отсутствуют, так что сопротивление катушки носит активный характер (R). Ток в последовательно включенных катушках относительно большой, он как бы имитирует замыкание контактов в контактной системе (реле включается).
При замыкании шунтом П-образного магнитопровода магнитный поток, пересекающий его катушку, возрастает, в связи с чем увеличиваются э.д.с. самоиндукции, а также обусловленное им индуктивное сопротивление катушки. Вследствие этого ток в последовательно включенные катушках уменьшается, имитируя размыкание цепи в контактной системе (исполнительное реле отключается).
Герконовый датчик представляет собой П-образный корпус, в котором размещены с одной стороны от паза две герметизированные стеклянные колбы с вакуумом внутри и укрепленными на пружинящих пластинах контактами, подключенными к соответствующим цепям управления лифтом. С другой стороны от паза находится постоянный магнит. Рабочим элементом таких датчиков является ферромагнитный шунт, который проходит через П-образный разрез при движении кабины лифта.
Принцип работы этих датчиков следующий: пружинящие силы пластин контактов герконов направлены так, что если на них поле постоянного магнита не действует, то нормально разомкнутые контакты разомкнуты, а нормально замкнутые — замкнуты, т. е. цепи, к которым подключены эти контакты, будут разомкнуты или замкнуты.
Такое состояние геркона будет тогда, когда ферромагнитный шунт находится в пазе П-образного корпуса, поскольку магнитные силовые линии постоянного магнита замыкаются через шунт. После того как шунт выйдет из паза, магнитные силовые линии замыкаются через пластины, преодолевая их пружинящее действие, и контакты геркона, а следовательно, цепи к которым они подключены, переходят в противоположное состояние.

В качестве примера, отражающего основные особенности схем управления лифтами, рассмотрим схему управления одиночным лифтом без попутных остановок, показанную на рис. 1. Лифт обслуживает четыре этажа, в качестве исполнительного двигателя здесь использован двухскоростной асинхронный двигатель М.
Включение на малую (Мл) или большую (Б) частоту вращения двигателя производится соответствующими контакторами Мл и Б. Направление вращения двигателя определяется контакторами В и Н, замедление - дополнительным резистором Р, торможение — электромагнитным тормозом ЭТ.
В качестве этажных переключателей использованы бесконтактные индуктивные датчики (ДТС, ДТОВ и ДТОН), включенные последовательно с катушками реле (РИС, РИТОВ, РИТОН). Датчики ДТС служат для включения привода лифта на высокую частоту вращения и подачи импульса на его замедление, а датчики ДТОВ и ДТОН предусмотрены для точной остановки лиф га на уровне пола соответствующего этажа и размещены на кабине, магнитные шунты для них устанавливаются в стволе шахты.
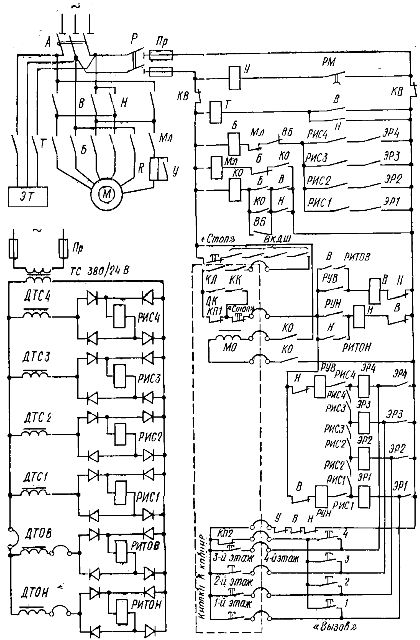
Рис. 1. Принципиальная схема управления одиночным лифтом
Назначение остальных элементов схемы и ее работу рассмотрим на примере перемещения кабины с пассажиром с 1-го на 3-й этаж, полагая при этом, что автомат А, разъединитель Р и конечные выключатели KB, ограничивающие ход кабины вверх и вниз в аварийных режимах, замкнуты, а кабина находится на первом этаже. В этом случае катушки реле РИС, кроме реле первого этажа, обтекаются номинальным током.
При нажатии кнопки "3-й этаж" образуется следующая электрическая цепь: фаза сети — полюс разъединителя Р — предохранитель Пр — конечный включатель KB — кнопка "Стоп" — блокировки дверей шахты Дв1 - Дв4 — контакты натяжения каната КК — конечный выключатель ловителя КЛ — дверные выключатели кабины ДК — контакты кнопки "Стоп" — размыкающий блок-контакт Н — катушка реле РУВ — замыкающие контакты реле РИС4 и РИСЗ (катушки этих реле обтекаются током) — катушка этажного реле ЭРЗ — кнопка "3-й этаж" — размыкающие блок-контакты контакторов У, В, Н — конечный выключатель KB — предохранитель Пр — полюс разъединителя Р — фаза сети.
После срабатывания реле РУВ и ЭР3 включаются контактор движения вперед В, контактор быстрого движения Б (по цепи катушки Б — блок-контакт Мл — выключатель большой частоты вращения ВБ — контакты реле РИСЗ и ЭР3). При замыкании контактов В и Б двигатель подключается к сети, включаются контактор Т, растормаживающий канатоведущий шкив, и контактор отводки КО, включающий электромагнит отводки МО и подготавливающий к включению цепь катушки контактора малой частоты вращения Мл. Огводка втягивается, освобождая рычаг замка, и кабина приходит в движение.
При подходе кабины к третьему этажу ферромагнитный шунт замыкает катушку датчика ДТСЗ, ее сопротивление увеличивается и реле РИСЗ отпадает, отключая реле ЭР3 и РУВ. В результате этого контактор Б отпадает, замыкая свой контакт, включает контактор малой частоты вращения Мл, а контактор В остается включенным, так как при движении кабины еще не замкнута магнитная цепь датчика точной остановки вверх, поэтому и контакт РИТОВ еще не разомкнут. Двигатель тормозится до малой частоты вращения, работая в генераторном режиме с введенным в одну фазу статора резистором R. Выдержка времени торможения задается маятниковым реле РМ, работающим при включении контактора Мл.
Как только пол кабины выравняется с полом этажного перекрытия, магнитный шунт замыкает магнитную цепь катушки датчика точной остановки ДТОВ, реле РИТОВ отпадает и происходит отключение контакторов В, затем КО и, наконец, Мл. В результате двигатель и тормозной электромагнит отключаются от сети, накладывается механический тормоз и кабина останавливается.
Для того чтобы подучить собирательную схему управления лифтом с попутными остановками только при опускании кабины или полностью собирательную схему, т. е. при попутных остановках во время движения кабины вверх и вниз, необходимо в схему, подобную рассмотренной на рис. 1, ввести некоторые дополнения. Например, в схеме, с двухскоростными двигателем индуктивные датчики ИД, реле РИС и кнопки вызова и приказа на каждом этаже включаются так, как показано на рис. 2.
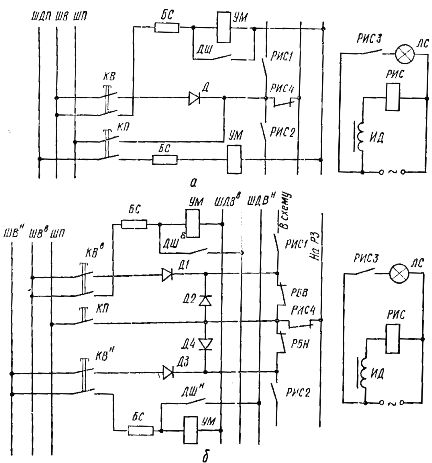
Рис. 2. Фрагменты дополнений к собирательным схемам управления лифтом (дли одного этажа)
В схеме с попутными остановками при опускании кабины (рис, 2, а) вызовы и приказы подаются раздельными залипающими кнопками и поэтому могут регистрироваться в любое время, а передаваться в схему сразу же, кроме периоде движения кабины с пассажирами вверх, когда шина питания контактов передачи вызовов в исполнительную схему отключается избирательными контактами от плюсовой шины.
В полной избирательней схеме управления (рис. 2, б) дополнительно имеются вызывные цепи для подъема (ШДВв) и опускания (ШДВн) кабины, контакты блокировочных реле направления РБВ и РБН соединены с контактами избирательной секционированной цепочки исполнительной схемы.
В схемах, изображенных на рис. 1 и 2, при отсутствии кабины на этаже катушки индуктивного датчика ИД и реле РИС возбуждены. Поэтому при нажатии кнопки приказа КП или вызова КВ (они удерживаются во включенном состоянии удерживающими магнитами УМ до тех пор, пока их не зашунтируют контакты дверей шахты данного этажа ДШ) образуется цепь (на рисунках не показана), включающая в себя реле управления вверх РУВ, если этаж назначения выше этажа стоянки кабины, или реле управления вниз РУН, если этаж назначения ниже стоянки кабины.
После прибытия кабины на этаж вызова обесточивается индуктивный датчик ИД, отключается реле РИС, размыкая свои контакты, которые отключают реле РУВ или РУН и лампу ЛС (кабина останавливается), а замыканием контакта РИС4 подготавливается цепь для выполнения приказа, поступающего из кабины.
В полной собирательной схеме секционированная контактами РИС1 н РИС2 цепочка на этаже стоянки кабины разрывается не только этими контактами, но еще и контактами реле блокировки вверх РБВ или вниз РБН (катушки их на схеме не показаны), а вызывные цепи подъема, спуска и цепи приказов отделяются друг от друга разделительными диодами Д1 - Д4.
Перед нажатием кнопки вызова или приказа, если направление движения кабины еще не выбрано, все контакты в цепочке выбора направления замкнуты, кроме контактов РИС4 на этаже стоянки кабины. Поэтому при нажатии одного из этих кнопок сигналы вызовов с этажей, расположенных выше этажа стоянки кабины, подключаются к катушке реле РУН, а сигналы вызовов с этажей ниже стоянки кабины включают реле РУВ. После выбора направления одновременно с реле РУВ или РУН включается одно из реле блокировки противоположного направления РБВ или РБН, разрывающее своими контактами выход через секционную цепочку сигналов вызова непопутного направления.
В схеме, показанной па рис. 2, а, для опускания пассажиров кабина без остановок проходит до наиболее высокого этажа вызова и затем опускается с попутными остановками, а в схеме, изображенной на рис. 2, б, при необходимости подъема пассажиров кабина проходит до наиболее низкого этажа вызова, после чего поднимается с попутными остановками.
В рассмотренных схемах селекторы выполнены на релейных элементах. Наряду с этим применяются и другие селекторы: кулачковые, фотоэлектрические, щеточные непрерывного слежения, шаговые, на статических элементах и т. д.
При больших пассажиропотоках в одном холле устанавливают несколько лифтов, которые для повышения комфортабельности и улучшения электроэнергетических показателей имеют объединенное парное или групповое управление. Количество лифтов, соединенных в группы, обычно не превышает четырех, а чаще трех, хотя известны системы, содержащие в группе до восьми лифтов.
При групповом управлении обычно различают три основных режима работы лифтов: пик подъема, пик спуска и уравновешенное движение в обоих направлениях. Включение лифтов на тот или иной режим осуществляется диспетчером или автоматически посредством программирующих часов, устанавливаемых на каждую группу лифтов.
В высотных зданиях каждая группа лифтов закрепляется для обслуживания определенной зоны этажей, другие этажи ею не обслуживаются. При наличии нескольких лифтов в группе, обслуживающих одну зону или невысокое здание, в целях повышения средней скорости движения путем сокращения числа остановок отдельные лифты могут выделяться для обслуживания четных и нечетных этажей.
Для осуществления парного или группового управления лифтами схемы управления ими должны быть собирательными, а вызовы каждого этажа в обоих направлениях должны регистрироваться раздельно в каждом направлении соответствующими запоминающими устройствами, содержащими реле, транзисторы и т. д.
В качестве примера, отражающего специфику работы при парном управлении лифтами с дополнительными реле стоянки первого лифта 1PC и второго лифта 2РС, рассмотрим фрагмент принципиальной схемы, показанный на рис. 3.
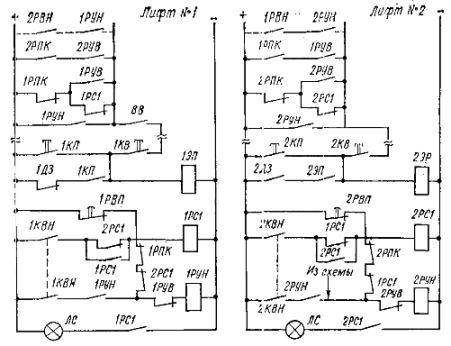
Рис. 3. Фрагмент принципиальной схемы парного управления лифтами: ЭР — этажное реле, РПК - реле переключения каналов, РВП реле автоматического пуска
В этом случае кабина, опустившаяся с пассажирами на первый этаж, не отвечает на вызовы с других этажей и ожидает пассажиров. Если же кабины на первом этаже нет, то поднявшаяся по приказу и освободившаяся кабина автоматически направляется на первый этаж, а при спуске другой кабины или ее стоянке последняя остается на этаже окончания рейса либо направляется к центру нагрузки и используется для работы по вызовам в основном в направлении опускания.
Реле стоянки кабины на первом этаже 1РС1 или 2РС1 включается после прибытия кабины на первый этаж от конечного выключателя 1КВН или 2КВН (устанавливаются в шахтах на копираппарате). Эти реле взаимно сблокированы. Поэтому включение одного из них указывает на то, что данная кабина прибыла на первый этаж раньше другой. В этом случае реле 1РС1 или 2РС1 своим замыкающим контактом включает сигнальную лампу ЛС, а размыкающим — разрывает вызывную цепь своего лифта, отключая вызов на время стоянки кабины на первом этаже.
При уходе кабины с первого этажа ее сигнальная лампа ЛС гаснет, питание вызываемых цепей этого лифта после освобождения кабины сразу же восстанавливается, а после прихода кабины другого лифта на первый этаж включается ее реле PC. Эта кабина остается стоять на первом этаже в ожидании пассажиров (о чем сигнализирует зажиганием ее сигнальная лампа ЛС). При освобождении поднявшейся по приказу кабины и отсутствии вызовов в схему подается сигнал, включающий размыкающими контактами конечного выключателя 1КВН или 2КВН реле 1РУН или 2РУВ катушки реле 1РУН или 2РУВ, и кабина направляется на первый этаж и т. д.
Аппаратура управления двигателями типовых лифтов при одиночном, парном и групповом управлениях обычно располагается на типовых панелях, станциях или блоках управления, устанавливаемых в машинных помещениях.
Управление приводом грузового лифта

Рассмотрим упрощенную принципиальную схему привода грузового лифта с асинхронным двигателем. Управление пуском двигателя осуществляется реверсивным магнитным пускателем, а торможение – электромагнитным тормозом ЭТМ. На первом этаже у шахты обычно размещают кнопочную станцию управления. Число пусковых кнопок соответствует числу этажей. Нажатие кнопки определенного этажа осуществляется при помощи этажных переключателей ЭП и этажных реле ЭР. Трехпозиционные переключатели включаются самой кабиной при ее движении вверх и вниз.
На схеме рис. 1 оба контакта этажного переключателя разомкнуты на том этаже, где в данный момент стоит кабина. На всех этажах, расположенных ниже кабины, замкнуты левые контакты, а на этажах, находящихся выше кабины, – правые контакты. Для экстренного останова кабины следует нажать кнопки С. В цепь управления наряду с кнопкой С последовательно включены дверные шахтные конечные выключатели всех этажей и контакт ловителя КЛ.
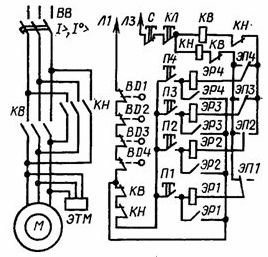
Рис. 1. Схемы электропривода грузового лифта
Рассмотрим принцип действия схемы управления лифтом (см. рис. 1). Кабина остановилась на втором этаже, поэтому контакты ЭП2 разомкнуты. При включенном вводном выключателе ВВ можно произвести, например, спуск кабины на первый этаж.
Для этого нажимают на пусковую кнопку П1 первого этажа и замыкают тем самым цепь катушки контактора КН. При этом путь тока будет следующим: от линейного провода Л1 через дверные конечные выключатели BD1, BD2, BD3, BD4 размыкающие блок-контакты KB, КН, кнопку пуска П1, катушку реле ЭР1, левый контакт ЭП1 этажного переключателя, размыкающий блок-контакт KB, катушку контактора КН, размыкающую кнопку ловителя кабины КЛ, кнопку С и линейный провод Л3.
После срабатывания контактора КН размыкающий блок-контакт КН отключается, но цепь питания катушки контактора не разрывается, так как ток в катушку КН будет проходить через замыкающий контакт ЭР1 реле ЭР1 помимо блок-контакта КН и кнопки П1.

Рис. 2. Грузовой лифт
Электромагнитный тормоз ЭТМ получит питание одновременно с обмоткой статора двигателя и отпустит тормозные колодки. Двигатель будет перемещать кабину вниз на первый этаж до встречи с этажным переключателем ЭП1, который отключит свои контакты и тем самым разорвет цепь питания катушки контактора КН. Тормозной магнит немедленно отпустит свои колодки и остановит двигатель.
Если необходимо переместить кабину, например с грузом на четвертый этаж, то прежде всего нужно закрыть двери кабины и затем нажать на кнопку четвертого этажа П4. От линейного провода Л1 ток пойдет через дверные шахтные конечные выключатели BD1, BD2, BD3, BD4, размыкающие блок-контакты KB и КН, пусковую кнопку П4, катушку реле ЭР4, правый контакт этажного переключателя ЭП4, размыкающий блок-контакт КН, катушку контактора KB, кнопку ловителя кабины КЛ, кнопку С «стоп» и линейный провод Л3. Получив питание, катушка контактора KB замкнет силовые контакты КВ.

Электромагнитный тормоз и двигатель получат питание. Двигатель начнет вращаться в противоположную сторону и поднимать кабину вверх. Одновременно блок-контакт KB размыкается, но цепь питания катушки контактора KB не обрывается, так как после срабатывания реле ЭР4 самоблокируется своим замыкающим контактом ЭР4, и ток будет проходить мимо блок-контактов KB и КН и кнопки П4. Когда кабина достигнет четвертого этажа, этажный переключатель ЭП4 разорвет цепь питания катушки контактора KB и произойдет немедленный останов двигателя.
Если перед пуском двигателя какая-либо дверь окажется не закрытой или неплотно закрытой, то пуск двигателя невозможен, поскольку все четыре дверных шахтных конечных выключателя включены последовательно с катушками реверсивного магнитного пускателя. Защита двигателя осуществляется автоматическим выключателем ВВ.
Читайте также: